Σε αυτήν την εποχή του βιομηχανικός αυτοματισμός , τα ρομπότ χρησιμοποιούνται για τον χειρισμό διαφόρων διαδικασιών για ακριβή και καλύτερη ποιότητα παραγωγής. Η επιλογή του ιδανικού κινητήρα για τέλειο ρομπότ είναι πάντα μια δύσκολη εργασία ενώ σχεδιάζουμε το ρομπότ ειδικά για τις βιομηχανίες. Η σωστή επιλογή του ηλεκτρικοί κινητήρες Στα βιομηχανικά ρομπότ απαιτούνται αρκετές παράμετροι για τον έλεγχο του βραχίονα, τη θέση, τις γωνιακές και γραμμικές κινήσεις.

Κινητήρες που χρησιμοποιούνται στη βιομηχανική ρομποτική
Η επιλογή κινητήρα είναι η λιγότερο κατανοητή έννοια για τους χομπίστες ρομποτικής που απαιτούν στρατηγική και σοβαρή ανάλυση. Περιλαμβάνει τον προσδιορισμό της ταχύτητας ρομπότ, της επιτάχυνσης, των απαιτήσεων ροπής βάσει του βάρους του ρομπότ, του μεγέθους του τροχού και της εφαρμογής που πρέπει να εφαρμοστεί. Υπάρχουν πολλοί τύποι κινητήρων είναι διαθέσιμα στη σημερινή αγορά, αλλά κυρίως κινητήρες Tiny pager, σερβο κινητήρες , γραμμικοί κινητήρες, κινητήρες stepper και οι κινητήρες DC ταχυτήτων χρησιμοποιούνται σε βιομηχανικά ρομπότ ανάλογα με την περιοχή εφαρμογής τους.
Η ακατάλληλη επιλογή του κινητήρα καταλήγει σε ένα ρομπότ με ειδικές ανάγκες, οπότε ποιος τύπος κινητήρα είναι ο πιο κατάλληλος και κατάλληλος για να κάνει τα βιομηχανικά ρομπότ πραγματικά, ακριβή και επαρκή για την κάλυψη όλων των αναγκών της βιομηχανικής διαδικασίας, έχοντας παράλληλα υπόψη όλες τις ρεαλιστικές προδιαγραφές;
Εδώ συλλέξαμε κάποιες πληροφορίες αυτού του κινητήρα από βιομηχανικούς επαγγελματίες για την επιλογή του αντίστοιχου κινητήρα που θα επιλεγεί για βιομηχανικές εφαρμογές.
Σας ενθαρρύνουμε να ακολουθήσετε τις γνώμες των ειδικών που στοχεύουν στην παροχή των καλύτερων κινητήρων για βιομηχανική ρομποτική με διαθέσιμους κινητήρες DC, stepper, χωρίς ψήκτρες και σερβο για ακριβείς, οικονομικά αποδοτικές και αξιόπιστες κινήσεις ρομπότ.
Χ. Σαμπάθ Κουμάρ
M.tech στο VLSI Design
Συγγραφέας τεχνικού περιεχομένου
 Οι κινητήρες DC διατίθενται σε ευρεία κλίμακα για συνεχή λειτουργία, αλλά απαιτούν μειώσεις ταχυτήτων ώστε να ταιριάζουν στην αντίστοιχη εφαρμογή. Ο κινητήρας Stepper δεν απαιτεί μείωση της ταχύτητας, καθώς η κλιμακωτή λειτουργία του παρέχει χαμηλή ταχύτητα για συγκεκριμένες εφαρμογές. Επιτέλους, οι σερβοκινητήρες χρησιμοποιούνται για ακριβή και ακριβή έλεγχο που εφαρμόζεται σε λειτουργίες κλειστού βρόχου. Αλλά απαιτεί επιπλέον ανατροφοδότηση και κυκλώματα οδήγησης, οπότε είναι ακριβό από τον κινητήρα DC και το stepper. Έτσι, οι σερβοκινητήρες κάνουν το ρομπότ πιο αξιόπιστο λόγω της ακριβούς κίνησής του.
Οι κινητήρες DC διατίθενται σε ευρεία κλίμακα για συνεχή λειτουργία, αλλά απαιτούν μειώσεις ταχυτήτων ώστε να ταιριάζουν στην αντίστοιχη εφαρμογή. Ο κινητήρας Stepper δεν απαιτεί μείωση της ταχύτητας, καθώς η κλιμακωτή λειτουργία του παρέχει χαμηλή ταχύτητα για συγκεκριμένες εφαρμογές. Επιτέλους, οι σερβοκινητήρες χρησιμοποιούνται για ακριβή και ακριβή έλεγχο που εφαρμόζεται σε λειτουργίες κλειστού βρόχου. Αλλά απαιτεί επιπλέον ανατροφοδότηση και κυκλώματα οδήγησης, οπότε είναι ακριβό από τον κινητήρα DC και το stepper. Έτσι, οι σερβοκινητήρες κάνουν το ρομπότ πιο αξιόπιστο λόγω της ακριβούς κίνησής του.
Viswanath Prathap
M.Tech στην Ηλεκτρολογία Ηλεκτρολόγων Μηχανικών
Συγγραφέας τεχνικού περιεχομένου

Επιλογή και τοποθέτηση Τα ρομπότ βρίσκονται συνήθως σε βιομηχανίες για να επιλέξουν ένα αντικείμενο από μια θέση ή μέρος και να το τοποθετήσουν σε άλλη θέση ή μέρος. Για το σκοπό αυτό, πρέπει να ελέγχονται οι γωνιακές κινήσεις των αρθρώσεων των ρομπότ, οι οποίες μπορούν να επιτευχθούν χρησιμοποιώντας σερβοκινητήρες. Αυτοί οι σερβοκινητήρες ελέγχονται χρησιμοποιώντας δεδομένα PWM που δίνονται από τον ρομποτικό ελεγκτή για την ενεργοποίηση των αρμών των ρομπότ. Οι σερβοκινητήρες είναι σε θέση να παράγουν αρκετή ροπή για να μετακινήσετε ένα αντικείμενο γρήγορα από τη θέση ακινητοποίησης. Έτσι, αυτά χρησιμοποιούνται ως τροχοί σε στρατιωτικά και βιομηχανικά ρομποτικά οχήματα. Οι κινητήρες Stepper μπορούν επίσης να χρησιμοποιηθούν για τον έλεγχο της θέσης, αλλά αυτοί θα καταναλώνουν ισχύ ακόμη και στην περίοδο ανάπαυσης για να κλειδώνουν και να κρατούν τη θέση εντολής. Έτσι, οι σερβοκινητήρες χρησιμοποιούνται συνήθως στη βιομηχανική ρομποτική ως υποκατάστατο υψηλής απόδοσης των κινητήρων stepper.
Σ. Naresh Reddy
M.tech στο ενσωματωμένο σύστημα
Οδηγός έργου
Η δομή του μηχανικού ρομπότ πρέπει να ελέγχεται σε τέλεια  rm εργασία. Υπάρχουν τρεις διαφορετικές φάσεις για τον έλεγχο του ρομπότ όπως η αντίληψη, η επεξεργασία και η δράση. Οι αισθητήρες δίνουν τις πληροφορίες σχετικά με τη θέση των αρθρώσεων και τον τελικό τελεστή του στο ρομπότ, τότε αυτές οι πληροφορίες υποβάλλονται σε επεξεργασία στη μονάδα ελέγχου και υπολογίζουν το κατάλληλο σήμα στον κινητήρα που κινείται μηχανικά. Η συντριπτική πλειονότητα των ρομπότ χρησιμοποιεί ηλεκτρικούς κινητήρες. Οι επαναλαμβανόμενοι κινητήρες DC χωρίς ψήκτρες και βούρτσες χρησιμοποιούνται σε φορητά ρομπότ και οι κινητήρες AC χρησιμοποιούνται σε βιομηχανικά ρομπότ. Αυτοί οι κινητήρες προτιμώνται σε συστήματα με ελαφρύτερα φορτία και όπου η κυρίαρχη μορφή κίνησης είναι περιστροφική.
rm εργασία. Υπάρχουν τρεις διαφορετικές φάσεις για τον έλεγχο του ρομπότ όπως η αντίληψη, η επεξεργασία και η δράση. Οι αισθητήρες δίνουν τις πληροφορίες σχετικά με τη θέση των αρθρώσεων και τον τελικό τελεστή του στο ρομπότ, τότε αυτές οι πληροφορίες υποβάλλονται σε επεξεργασία στη μονάδα ελέγχου και υπολογίζουν το κατάλληλο σήμα στον κινητήρα που κινείται μηχανικά. Η συντριπτική πλειονότητα των ρομπότ χρησιμοποιεί ηλεκτρικούς κινητήρες. Οι επαναλαμβανόμενοι κινητήρες DC χωρίς ψήκτρες και βούρτσες χρησιμοποιούνται σε φορητά ρομπότ και οι κινητήρες AC χρησιμοποιούνται σε βιομηχανικά ρομπότ. Αυτοί οι κινητήρες προτιμώνται σε συστήματα με ελαφρύτερα φορτία και όπου η κυρίαρχη μορφή κίνησης είναι περιστροφική.
Suresh megaji
M. Tech σε ασύρματα συστήματα επικοινωνιών
Συγγραφέας τεχνικού περιεχομένου

Αν θέλετε να ασχοληθείτε με τη «ρομποτική» και την εφαρμογή τους στη «βιομηχανία», θα πρέπει να γνωρίζετε για τους «κινητήρες» που χρησιμοποιούνται στη ρομποτική, επειδή η ρομποτική εξαρτάται κυρίως από τους κινητήρες. Βασικά τα «ρομποτικά μηχανήματα» χρησιμοποιούνται για διαφορετικές εφαρμογές στην παραγωγή. Διαφορετικοί «κινητήρες» όπως οι κινητήρες D.C, Pulsed, Stepper, Optical drive, Partial turn και hall effect, κλπ… χρησιμοποιούνται με μερικές τεχνικές για να τις εφαρμόσουν στη βιομηχανία και να τις κάνουν φιλικές, όπως
- Οι κινητήρες D.C χρησιμοποιούνται για εφαρμογές με προσανατολισμό στη μπαταρία, χαμηλότερη ταχύτητα, εφαρμογές κινητικότητας.
- Όπου χρειαζόμαστε μια εφαρμογή περιστροφής, μπορούμε να χρησιμοποιήσουμε κινητήρες Stepper όπως μονοπολικούς και διπολικούς κινητήρες.
- Για κινήσεις κεφαλής και βραχίονα, μπορούμε να χρησιμοποιήσουμε μερικούς κινητήρες περιστροφής.
- Εάν θέλουμε να χρησιμοποιήσουμε μαγνητικά πεδία, μπορούμε να χρησιμοποιήσουμε Hall Effect και κινητήρες οπτικής κίνησης κ.λπ.
Χρησιμοποιώντας ρομποτική που χρησιμοποιούν έξυπνους κινητήρες, μπορούμε να εξοικονομήσουμε χρήματα, χρόνο, χώρο, επικίνδυνες κινήσεις κ.λπ.
Ατζέ Σαχάρε
Εκτελεστικό μάρκετινγκ

Τα βιομηχανικά ρομπότ χρησιμοποιούνται σε βιομηχανικό περιβάλλον παραγωγής. Αυτοί είναι οι βραχίονες που αναπτύχθηκαν ειδικά για εφαρμογές όπως συγκόλληση, χειρισμός υλικών, βαφή και άλλα.
Δεν μπορεί να θεωρηθεί ως ρομπότ κάθε μηχατρονική συσκευή που χρησιμοποιείται στο βιομηχανικό περιβάλλον. Όπως ορίζεται από το ISO (Διεθνής Οργανισμός Προτύπων), ένας αυτόματα ελεγχόμενος, επαναπρογραμματιζόμενος, χειριστής πολλαπλών χρήσεων προγραμματιζόμενος σε τρεις ή περισσότερους άξονες θεωρείται βιομηχανικό ρομπότ.
Οι κινητήρες που χρησιμοποιούνται στη βιομηχανική ρομποτική είναι
- Κινητήρες εναλλασσόμενου ρεύματος (AC)
- Κινητήρες συνεχούς ρεύματος (DC)
- Servo Motors
- Stepper Motors.
1. Οι κινητήρες εναλλασσόμενου ρεύματος μπορούν να υποδιαιρεθούν περαιτέρω σε ασύγχρονους και σύγχρονους τύπους. Για παράδειγμα, ένας επαγωγικός κινητήρας εναλλασσόμενου ρεύματος είναι μια μονάδα ασύγχρονου τύπου που ουσιαστικά αποτελείται από ένα στάτη καλωδίου και έναν ρότορα. Η ισχύς συνδέεται με το καλώδιο και το ρεύμα AC που ρέει μέσω αυτού προκαλεί ένα ηλεκτρομαγνητικό πεδίο (EM) στο κουλουριασμένο καλώδιο, με ένα αρκετά ισχυρό πεδίο που παρέχει τη δύναμη για κίνηση του ρότορα. Οι σύγχρονοι κινητήρες είναι κινητήρες σταθερής ταχύτητας που λειτουργούν συγχρονισμένα με τη συχνότητα γραμμής AC και χρησιμοποιούνται συνήθως όπου απαιτείται ακριβής σταθερή ταχύτητα.
2. Πολλές βιομηχανικές εφαρμογές, συμπεριλαμβανομένης της ρομποτικής, χρησιμοποιούν συχνά κινητήρες DC λόγω της ευκολίας ελέγχου της ταχύτητας και της κατεύθυνσης. Είναι ικανά για ένα άπειρο εύρος ταχύτητας, από πλήρη ταχύτητα έως μηδέν, με ένα ευρύ φάσμα φορτίων.
Επειδή οι κινητήρες DC διαθέτουν υψηλή αναλογία ροπής προς αδράνεια, μπορούν να ανταποκριθούν γρήγορα σε αλλαγές στα σήματα ελέγχου. Ένας κινητήρας DC μπορεί να ελεγχθεί ομαλά σε μηδενική κίνηση και να επιταχυνθεί άμεσα στην αντίθετη κατεύθυνση χωρίς την ανάγκη περίπλοκων κυκλωμάτων εναλλαγής ισχύος. Οι κινητήρες συνεχούς μαγνήτη χωρίς ψήκτρες DC είναι συνήθως πιο ακριβοί από τους τύπους πινέλου, αν και μπορούν να προσφέρουν πλεονεκτήματα στην κατανάλωση ισχύος και την αξιοπιστία.
Χωρίς μετατροπέα, οι κινητήρες χωρίς ψήκτρες μπορούν να λειτουργούν πιο αποτελεσματικά και σε υψηλότερες ταχύτητες από τους συμβατικούς κινητήρες DC. Οι περισσότεροι κινητήρες συνεχούς ρεύματος χωρίς ψήκτρες λειτουργούν με τραπεζοειδή κυματομορφή εναλλασσόμενου ρεύματος, αλλά μερικοί από τους κινητήρες λειτουργούν με ημιτονοειδή κύματα. Οι κινητήρες χωρίς ψήκτρες με ημιτονοειδή κύματα μπορούν να επιτύχουν ομαλή λειτουργία σε χαμηλότερες ταχύτητες με χαμηλή ροπή ροπής, καθιστώντας τους ιδανικούς για λείανση, επίστρωση και άλλες εφαρμογές όπως φινίρισμα επιφάνειας.
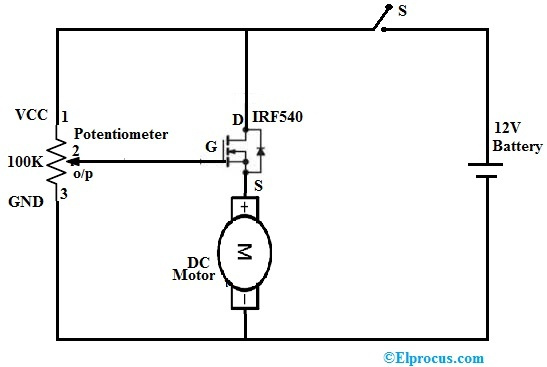
Στην περίπτωση κινητήρων Brushed DC, εάν θέλετε ο κινητήρας σας να περιστρέφεται πιο αργά χωρίς απώλεια ισχύος, μπορείτε να χρησιμοποιήσετε διαμόρφωση πλάτους παλμού (PWM). Αυτό ουσιαστικά σημαίνει να ενεργοποιήσετε και να απενεργοποιήσετε τον κινητήρα πολύ γρήγορα. Με αυτόν τον τρόπο, ο κινητήρας περιστρέφεται με χαμηλότερη ταχύτητα σαν να εφαρμοζόταν χαμηλότερη τάση χωρίς να προσέξουμε την ισχύ.
Βασικά, η ροπή που παράγεται από ένα βουρτσισμένο κινητήρα DC είναι πολύ μικρή και η ταχύτητα είναι πολύ μεγάλη για να είναι χρήσιμη. Έτσι, οι μειώσεις ταχυτήτων χρησιμοποιούνται συνήθως για τη μείωση της ταχύτητας και την αύξηση της ροπής.
3. Οι σερβοκινητήρες χρησιμοποιούνται σε συστήματα κλειστού βρόχου με ψηφιακό ελεγκτή. Ο ελεγκτής στέλνει εντολές ταχύτητας σε έναν ενισχυτή προγράμματος οδήγησης, ο οποίος με τη σειρά του τροφοδοτεί τον σερβο κινητήρα. Κάποια μορφή συσκευής ανατροφοδότησης, όπως ένα πρόγραμμα ανάλυσης ή κωδικοποιητής, παρέχει πληροφορίες σχετικά με τη θέση και την ταχύτητα του σερβοκινητήρα. Ο αναλυτής ή ο κωδικοποιητής μπορεί να ενσωματωθεί στον κινητήρα ή να βρίσκεται σε απόσταση. Λόγω του συστήματος κλειστού βρόχου, ένας σερβοκινητήρας μπορεί να λειτουργήσει με ένα συγκεκριμένο προφίλ κίνησης που έχει προγραμματιστεί στον ελεγκτή.
4. Οι κινητήρες Stepper μπορούν να λειτουργήσουν με ή χωρίς ανάδραση, με την περιστροφή του κινητήρα χωρισμένη σε μικρά γωνιακά σκαλοπάτια. Ελέγχεται από παλμικά σήματα εντολών και μπορεί να σταματήσει με ακρίβεια σε σημείο εντολής χωρίς να χρειάζεται φρένο ή συγκρότημα συμπλέκτη. Όταν αφαιρεθεί η ισχύς, ένας βηματικός κινητήρας μόνιμου μαγνήτη παραμένει γενικά στην τελευταία του θέση. Πολλαπλοί βηματικοί κινητήρες μπορούν να διατηρηθούν σε συγχρονισμό οδηγώντας τους από μια κοινή πηγή.
Dev desai
Εκτελεστικό μάρκετινγκ 
Αν σκοπεύετε να ασχοληθείτε με τη ρομποτική, θα πρέπει να εξοικειωθείτε με τους πολλούς τύπους κινητήρων που διατίθενται. Όλες οι ρομποτικές κινήσεις είναι μηχανοκίνητες με τον ένα ή τον άλλο τρόπο, επομένως είναι σημαντικό να γνωρίζετε ποια είναι η επιλογή σας.
DC Motors
Εκτός από τη λειτουργία της μπαταρίας, η κατεύθυνση κίνησης ενός κινητήρα DC καθορίζεται από την πολικότητα της εισόδου ισχύος. Αυτό είναι απόλυτη αναγκαιότητα για ρομποτικές λειτουργίες. Ευτυχώς, αυτός ο τύπος κινητήρα διατίθεται σε μεγάλη ποικιλία μεγεθών, απαιτήσεις τάσης και διατίθεται παντού.
Οι διαφορετικοί τύποι κινητήρων είναι οι παρακάτω
- Κινητήρας βάσης κινητικότητας
- Κινητήρας χόμπι υψηλής ταχύτητας
- Κινητήρας με ιμάντα
- Αυτοκίνητο κουλοχέρη
- Λειτουργεί παλμός
- Κινητήρας προσαρμοσμένος στο βραχίονα
- Διπολικό βήμα με δείκτη
Bio Motor
Το Bio-metal είναι μια καταπληκτική ουσία που υπάρχει εδώ και μερικά χρόνια και έχει μια σειρά εφαρμογών στον τομέα της ρομποτικής. Στην εικόνα μπορούμε να δούμε, ότι ένα κομμάτι σύρματος βιο-μετάλλου θα συρρικνωθεί κατά πέντε τοις εκατό του μήκους του όταν εφαρμόζονται μόνο μερικά βολτ σε αυτό. Μετά από χρόνια δοκιμών, το bio-wire έχει αποδειχθεί ισχυρό, αξιόπιστο και γίνεται πιο χρήσιμο καθώς εμφανίζονται νέα προϊόντα. Ο κάπως βραδύτερος χρόνος απόκρισης το καθιστά ιδανικό για ρομποτικές εφαρμογές βραχιόνων και χεριών, όπου η ζακέτα θα ήταν προβληματική. Ένα μακρύ κομμάτι σύρματος μπορεί να παράγει σημαντική κίνηση όταν τεντώνεται όλο το μήκος ενός ρομποτικού βραχίονα. Υπάρχουν ρομποτικά εξαρτήματα στην αγορά που χρησιμοποιούν το βιολογικό μέταλλο.
Ρελέ
Το ρελέ, στη ρομποτική, χρησιμοποιείται σχεδόν πάντα για την απομόνωση της ισχύος που προορίζεται για τους κινητήρες, από το τροφοδοτικό για τη λειτουργία του υπολογιστή. Οι κινητήρες, λόγω της χαμηλής τους σύνθετης αντίστασης, απαιτούν μεγάλες απαιτήσεις ρεύματος σε τροφοδοτικά και δημιουργούν πολλαπλές δυσλειτουργίες που οι υπολογιστές δεν μπορούν να ανεχθούν. Επομένως, είναι καλή ιδέα να χρησιμοποιήσετε μια ξεχωριστή πηγή υψηλής τάσης για μόνο κινητήρες.
Στερεοειδή
Τα σωληνοειδή χρησιμοποιούνται καλύτερα ως συσκευές χειριστή χειριστή ή ως χειριστές εναλλαγής. Η κίνησή τους είναι γρήγορη και δυνατή, οπότε ένα ελατήριο χρησιμοποιείται σχεδόν πάντα για να μαλακώσει τη δράση. Όπως μπορείτε να δείτε στην εικόνα, τα καλώδια ελέγχου χρησιμοποιούνται για το κλείσιμο της σύλληψης. Αυτά τα καλώδια ελέγχου μπορούν επίσης να λειτουργήσουν ως ελατήρια επιστροφής. Γκρίσιες όπως αυτό βρίσκονται περισσότερο στη γραμμή παραγωγής όπου η εργασία είναι πολύ μετρημένη και καλύπτει στενές παραμέτρους.
Δευτερεύουσες λειτουργίες
Οι περισσότερες λειτουργίες κινητήρα περιλαμβάνουν κινητικότητα, βραχίονα, κεφάλι ή κάποια άλλη ορατή εξωτερική κίνηση, ωστόσο, ορισμένες κινητικές κινήσεις δεν είναι τόσο ορατές. Τα μεγάλα βιομηχανικά ρομπότ χρησιμοποιούν υδραυλικά συστήματα που χρησιμοποιούν κινητήρες αντλίας για να παράγουν πίεση λειτουργίας ενός υδραυλικού υγρού. Μια άλλη σημαντική δευτερεύουσα λειτουργία των κινητήρων είναι η ελεγχόμενη ρύθμιση. Για τη βελτίωση της ακρίβειας, τα ποτενσιόμετρα που συνδέονται με κινητήρες είναι συνήθως συσκευές πολλαπλών στροφών.
συμπέρασμα
Τα ρομπότ μπορεί να είναι πολύπλοκες συσκευές που απαιτούν μια μεγάλη ποικιλία κινήσεων με κινητήρα. Αυτό το άρθρο έχει σκοπό να δώσει μια επισκόπηση του εύρους των συσκευών που ενδέχεται να αντιμετωπίζετε ως ρομπότ. Θα ήταν καλή ιδέα να ξεκινήσετε κάνοντας έρευνα σχετικά με τους προμηθευτές ρομποτικού εξοπλισμού και τις διαθέσιμες προμήθειες. Υπάρχει τεράστια ποσότητα προϊόντος τώρα διαθέσιμη και το Διαδίκτυο διευκολύνει την εύρεση, την εκμάθηση και τη χρήση. Όποιες και αν είναι οι ανάγκες σας, λίγη ευφυΐα και η αποφασιστικότητα που φαίνεται να έχουν όλοι οι κατασκευαστές ρομπότ θα πρέπει να σας εξυπηρετούν καλά.
Σαμαντάν Βαντρέ
Εκτελεστικό μάρκετινγκ
'Κινητήρες που χρησιμοποιούνται στη ρομποτική'
- Κινητήρας βάσης κινητικότητας

- Κινητήρας χόμπι υψηλής ταχύτητας
- Κινητήρας με ιμάντα
- Αυτοκίνητο κουλοχέρη
- Λειτουργεί παλμός
- Κινητήρας προσαρμοσμένος στο βραχίονα
- Διπολικό βήμα με δείκτη

Οι μεγαλύτεροι κινητήρες ταιριάζουν καλύτερα στις βάσεις κινητικότητας που επιτρέπουν στα ρομπότ να κάνουν ελιγμούς στο έδαφος. Μερικοί από αυτούς τους κινητήρες διαθέτουν κιβώτια ταχυτήτων για παραγωγή της χαμηλότερης ταχύτητας και ροπής που απαιτείται για την κινητικότητα. Η μείωση της τάσης σε έναν κινητήρα μπορεί επίσης να την επιβραδύνει σε μια πιο επιθυμητή ταχύτητα. Μόνο ο πειραματισμός μπορεί να καθορίσει εάν ο κινητήρας σας θα λειτουργεί με χαμηλότερη τάση. Εάν συμβαίνει αυτό, έχετε σώσει πολλά προβλήματα, εάν όχι, υπάρχουν και άλλοι τρόποι επιβράδυνσης των κινητήρων. Ορισμένοι κινητήρες υψηλής ταχύτητας μπορούν να χρησιμοποιηθούν εάν χρησιμοποιούνται γρανάζια σκουληκιών ή κοχλίες.
Ένα παράδειγμα του κοχλιωτού γραναζιού φαίνεται στην απεικόνιση του ρομποτικού βραχίονα. Όταν ο κινητήρας περιστρέφεται δεξιόστροφα, το συγκρότημα μπουλονιού τραβιέται στον κινητήρα και ο βραχίονας συστέλλεται και όταν περιστρέφεται αριστερόστροφα, ο βραχίονας εκτείνεται. Παρόλο που ο άξονας του κινητήρα στρέφεται γρήγορα, η δράση του βραχίονα είναι πολύ πιο αργή λόγω της μείωσης των βιδών. Σε αυτήν την ακόλουθη απεικόνιση κυκλώματος κινητήρα, βλέπουμε έναν κινητήρα DC που ελέγχεται από ένα τρανζίστορ ισχύος. Ένας διακόπτης ρελέ (Double Pole Double Throw) καθορίζει την κατεύθυνση. Το τρανζίστορ Q1 θα πρέπει να είναι ένα τρανζίστορ ισχύος για να πάρει το βαρύ φορτίο ενός κινητήρα.
Παλμικοί κινητήρες
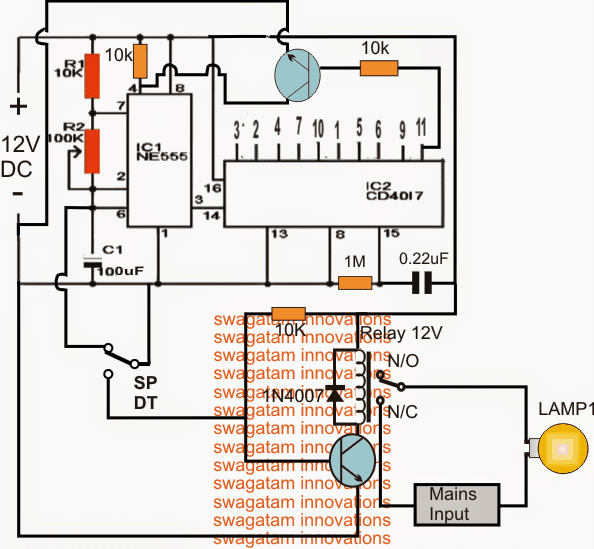
Ορισμένοι κινητήρες επιτυγχάνουν μείωση της ταχύτητας λειτουργώντας από ένα παλμικό σήμα DC. Αυτό το σήμα είναι συνήθως περίπου εκατό Hz. Η ταχύτητα του κινητήρα μπορεί να αλλάξει αλλάζοντας το πλάτος του παλμού, όχι αλλάζοντας τη συχνότητα του παλμού. Κινητήρες όπως αυτοί μπορούν να βρεθούν σε πλεονάζοντα καταστήματα ηλεκτρονικών ειδών και μπορούν εύκολα να αναγνωριστούν από τη γεννήτρια παλμών που είναι συνδεδεμένη σε αυτήν. Οποιοσδήποτε κινητήρας DC μπορεί να οδηγηθεί από μια πηγή παλμού, και περιλαμβάνεται ένα σχηματικό σχήμα ενός τέτοιου κυκλώματος.
Όπως μπορείτε να δείτε, ο χρονοδιακόπτης 555 επιλέχθηκε ως ταλαντωτής κίνησης, ο οποίος παράγει συχνότητα περίπου 100 Hz. Η αντίσταση R1 και ο πυκνωτής C σταθεροποιούν και απομονώνουν τη γεννήτρια παλμών από τις ακίδες που παράγονται από τον κινητήρα. Επειδή αυτή η συσκευή μπορεί να αντλήσει ρεύμα από 6 έως 12 βολτ, ίσως θελήσετε να αλλάξετε την τιμή του πυκνωτή C4 και C6 για καλύτερα αποτελέσματα, ανάλογα με την τάση που χρησιμοποιείτε. Η έξοδος παλμού λαμβάνεται από τον ακροδέκτη 3 του IC1 και τροφοδοτείται στον ακροδέκτη δύο του IC2, επίσης ένα χρονόμετρο 555.
Ο δεύτερος χρονοδιακόπτης μεταβάλλει το πλάτος του παλμού ρυθμίζοντας την τάση που τροφοδοτείται στον πυκνωτή C6 μέσω του ποτενσιόμετρου R5 και της αντίστασης R6. Η διάρκεια του παλμού καθορίζει την ταχύτητα του κινητήρα και το πλάτος του παλμού μπορεί να ρυθμιστεί από 10% σε 100%.
Το τρανζίστορ Q1 λαμβάνει το σήμα διαμορφωμένου πλάτους παλμού μέσω της αντίστασης R7. Δεδομένου ότι το Q1 είναι συσκευή χαμηλού ρεύματος, μεταδίδει το σήμα στο Q2, ένα τρανζίστορ ισχύος που μπορεί να χειριστεί τις τρέχουσες απαιτήσεις του κινητήρα. Αυτά τα τρανζίστορ δεν είναι κρίσιμα και σχεδόν οποιοσδήποτε τύπος τρανζίστορ χαμηλής ισχύος θα λειτουργεί. Το ρελέ θα καθορίσει ποια κατεύθυνση θα πάρει ο κινητήρας.
Stepper Motors
Το πιο σύνθετο όλων των κινητήρων είναι ο κινητήρας stepper. Όπως και το όνομα που ακολουθεί, ο κινητήρας περιστρέφεται σε βήματα και λειτουργεί με παλμό. Ο ακριβής βαθμός στροφής ανά βήμα μπορεί να διαφέρει από έναν κατασκευαστή ή μοντέλο σε άλλο, αλλά 20 μοίρες είναι δημοφιλής και παράγει 18 βήματα για μία πλήρη στροφή. Υπάρχουν δύο βασικοί τύποι βηματικών κινητήρων, διπολικών και μονοπολικών. Όπως μπορείτε να δείτε στο σχηματικό μοτέρ stepper, ο διπολικός κινητήρας είναι απλά ένας κινητήρας με δύο πηνία.
Ο μονοπολικός τύπος είναι δύο πηνία με κεντρικές βρύσες. Εάν αγνοηθούν οι κεντρικές βρύσες, ο μονοπολικός κινητήρας μπορεί να λειτουργήσει ως διπολικός τύπος. Τα δύο πηνία σε έναν κινητήρα stepper τροφοδοτούνται βηματικοί παλμοί εναλλάξ σε πολικότητα από πηνίο σε πηνίο. Ένας χάρτης αυτής της διαδικασίας παρέχεται στο διάγραμμα εργασίας για την γραφική απεικόνιση της δράσης του κινητήρα. Σε αντίθεση με τους συμβατικούς κινητήρες DC, η ροπή μειώνεται με την ταχύτητα. Απαιτείται επίσης ένας ειδικός τύπος μονάδας κίνησης για την προώθηση του βηματικού κινητήρα και πρέπει να παρέχεται με τον κινητήρα. Δεν συνιστάται να δημιουργήσετε μια μονάδα ελέγχου, εκτός εάν ο κινητήρας παρέχεται με ένα καλό φύλλο προδιαγραφών που έχει συστάσεις εξαρτημάτων και πλήρες σχηματικό.
Ο κινητήρας μπορεί να απαιτεί buffer για να το απομονώσει από το σύστημα κίνησης ή μπορεί να απαιτεί ξεχωριστή παροχή ρεύματος. Όποιες και αν είναι οι ανάγκες, μπορεί να διαφέρουν σημαντικά από τον ένα κινητήρα στον άλλο. Τα καταστήματα χόμπι είναι οι πιο αξιόπιστοι προμηθευτές κινητήρων stepper και παρόλο που τα πλεονάζοντα ηλεκτρονικά καταστήματα ενδέχεται να τα έχουν περιστασιακά, ενδέχεται να μην περιλαμβάνουν τις απαραίτητες πληροφορίες προδιαγραφών
Μερικοί κινητήρες στροφής
Ορισμένες ρομποτικές λειτουργίες απαιτούν μόνο μερική στροφή, όπως κινήσεις κεφαλής ή βραχίονα. Ο ευκολότερος τρόπος για να επιτευχθούν αυτά είναι με στάσεις θέσης και γρανάζια ολίσθησης. Μια απεικόνιση των μηχανικών λεπτομερειών αυτού του τύπου κινητήρα παρέχεται παραπάνω. Οι μικροδιακόπτες μπορούν να χρησιμοποιηθούν ως αισθητήρες διακοπής για απενεργοποίηση της λειτουργίας και επαναφορά της κατεύθυνσης για την επόμενη ενέργεια.
Ο κάτω τροχός συνδέεται με τον κινητήρα ενώ ο επάνω τροχός διαχωρίζεται από τον κάτω τροχό με ένα κυκλικό κομμάτι πιλήματος. Όταν ο κάτω τροχός γυρίζει ο επάνω τροχός γυρίζει μαζί του έως ότου ο πείρος διακοπής έρθει σε επαφή με τον μικροδιακόπτη. Ορισμένα σχέδια δεν προβλέπουν τη διακοπή του κινητήρα, έτσι απλές βίδες με αποστάτες θα λειτουργούν ως στάσεις κινητήρα.
Βιο-κινητήρας
Το Bio-metal είναι μια καταπληκτική ουσία που υπάρχει εδώ και μερικά χρόνια και έχει μια σειρά εφαρμογών στον τομέα της ρομποτικής. Στην εικόνα μπορούμε να δούμε, ότι ένα κομμάτι σύρματος βιο-μετάλλου θα συρρικνωθεί κατά πέντε τοις εκατό του μήκους του όταν εφαρμόζονται μόνο μερικά βολτ σε αυτό. Μετά από χρόνια δοκιμών, το bio-wire έχει αποδειχθεί ισχυρό, αξιόπιστο και γίνεται πιο χρήσιμο καθώς εμφανίζονται νέα προϊόντα. Ο κάπως βραδύτερος χρόνος απόκρισης το καθιστά ιδανικό για ρομποτικές εφαρμογές βραχιόνων και χεριών, όπου η ζακέτα θα ήταν προβληματική. Ένα μακρύ κομμάτι σύρματος μπορεί να παράγει σημαντική κίνηση όταν τεντώνεται όλο το μήκος ενός ρομποτικού βραχίονα. Υπάρχουν ρομποτικά εξαρτήματα στην αγορά που χρησιμοποιούν το βιολογικό μέταλλο.
Bhaskar Singh
Εκτελεστικό μάρκετινγκ
 Τα βιομηχανικά ρομπότ είναι συσκευές που σε κάποιο βαθμό αναπαράγουν την ανθρώπινη κίνηση μαζί με τη μείωση του κινδύνου, παρέχοντας περισσότερη δύναμη, ακρίβεια και συνέχεια. Χρειάζονται ένα ευρύ φάσμα κινήσεων με κινητήρα ανάλογα με τους τρόπους λειτουργίας τους, τον έλεγχο, τα εργαλεία που χρησιμοποιούνται και την εργασία που πρέπει να εκτελεστούν. Ένας βιομηχανικός ρομποτικός κινητήρας πρέπει να έχει τη δυνατότητα να χειρίζεται ένα ευρύ φάσμα εργασιών από τους κανονικούς κινητήρες, προκειμένου να ειδικεύεται σε μια συγκεκριμένη εργασία.
Τα βιομηχανικά ρομπότ είναι συσκευές που σε κάποιο βαθμό αναπαράγουν την ανθρώπινη κίνηση μαζί με τη μείωση του κινδύνου, παρέχοντας περισσότερη δύναμη, ακρίβεια και συνέχεια. Χρειάζονται ένα ευρύ φάσμα κινήσεων με κινητήρα ανάλογα με τους τρόπους λειτουργίας τους, τον έλεγχο, τα εργαλεία που χρησιμοποιούνται και την εργασία που πρέπει να εκτελεστούν. Ένας βιομηχανικός ρομποτικός κινητήρας πρέπει να έχει τη δυνατότητα να χειρίζεται ένα ευρύ φάσμα εργασιών από τους κανονικούς κινητήρες, προκειμένου να ειδικεύεται σε μια συγκεκριμένη εργασία.
Οι ηλεκτρικοί κινητήρες χρησιμοποιούνται συχνότερα στη βιομηχανική ρομποτική λόγω της υψηλής απόδοσης τροφοδοσίας ενέργειας και του σχετικά απλού σχεδιασμού που τους καθιστά πιο δημοφιλείς επιλογές όσον αφορά την αξιολόγηση κόστους-απόδοσης σε όλες τις πτυχές - εγκατάσταση, συντήρηση και συντήρηση.
Ανάλογα με την απαιτούμενη εργασία, χρησιμοποιούνται διαφορετικοί κινητήρες για διαφορετικούς σκοπούς. Για παράδειγμα, οι κινητήρες DC χρησιμοποιούνται για κινήσεις δεξιόστροφα και αριστερόστροφα, παραδείγματα είναι σε γερανούς και ανελκυστήρες, παλμικοί κινητήρες χρησιμοποιούνται για να παρέχουν παλμικές κινήσεις χρησιμοποιώντας πλάτος παλμού DC, κινητήρες μερικής στροφής χρησιμοποιούνται για να παρέχουν κινήσεις όπως το κεφάλι και το βραχίονα και οι πιο περίπλοκες. - Οι κινητήρες stepper χρησιμοποιούνται για την παροχή κλιμακωτών στροφών σε βήματα.
Επιπλέον, ανάλογα με τον τύπο εργασίας, οι κινητήρες με διαφορετικές βαθμολογίες και μεγέθη χρησιμοποιούνται για διαφορετικούς σκοπούς. Υπάρχουν διάφοροι τύποι κινητήρων που ο καθένας έχει διαφορετικές εφαρμογές σε διαφορετικά μέρη ανάλογα με την εργασία και το σχεδιασμό ρομπότ.
Μοχάν Κρίσνα. μεγάλο
Εκτελεστικό πωλήσεων και υποστήριξης
Τα ρομπότ χρησιμοποιούνται για να κάνουν τη δουλειά που μπορεί να γίνει από ανθρώπους και υπάρχουν πολλοί λόγοι για τους οποίους τα ρομπότ είναι καλύτερα από τους ανθρώπους. 
Υπάρχουν δύο βασικοί τύποι ρομπότ που είναι: -
Κινητό ρομπότ: Αυτό κινούνται στα πόδια ή τα ίχνη.
Στατικό ρομπότ: Αυτό έχει μια σταθερή βάση.
Στατικά ρομπότ συνήθως τα ρομπότ όπλα μπορούν να χρησιμοποιηθούν για την παραλαβή αντικειμένων ή για κάποια άλλη εργασία που συνεπάγεται την επίτευξη ενός αντικειμένου.
Ένας βραχίονας ρομπότ έχει τρία βασικά μέρη: -
- Άρθρωση ώμου
- Άρθρωση καρπού
- Σταθερή βάση
Χρειάζεστε ένα ρομπότ για το
- Δυνατότητα γρήγορης και επικίνδυνης εργασίας.
- Δυνατότητα επανάληψης εργασιών ξανά και ξανά.
- Ικανότητα εργασίας με ακρίβεια.
- Ικανότητα εκτέλεσης διαφορετικών εργασιών.
- Αποδοτικότητα.
Ο κινητήρας είναι μια συσκευή που μετατρέπει την ηλεκτρική ενέργεια σε μηχανική ενέργεια, δηλαδή ηλεκτρομηχανική συσκευή. Υπάρχουν δύο τύποι κινητήρων, όπως AC Motor και DC Motor
Ο κινητήρας που χρησιμοποιείται στη βιομηχανική ρομποτική είναι Servo Motor. Ο σερβο κινητήρας είναι ένας απλός ηλεκτρικός κινητήρας που ελέγχεται με τη βοήθεια σερβο μηχανισμού. Εάν ο ελεγχόμενος κινητήρας λειτουργεί με εναλλασσόμενο ρεύμα, ονομάζεται AC Servo motor διαφορετικά DC Servo motor. Οι περισσότεροι σερβοκινητήρες μπορούν να περιστραφούν περίπου 90 έως 180 μοίρες. Ακόμα και μερικοί περιστρέφονται μέσω πλήρως 360 μοίρες ή περισσότερο. Μερικές από τις Εφαρμογές του σερβοκινητήρα στη Ρομποτική είναι
- Εφαρμογή σερβο κινητήρα σε ρομποτικό, δηλαδή, ένα απλό ρομπότ επιλογής και τοποθέτησης, χρησιμοποιείται για την επιλογή ενός αντικειμένου από μία θέση και την τοποθέτηση του αντικειμένου σε διαφορετική θέση.
- Χρησιμοποιούνται σερβοκινητήρες στους Μεταφορείς
- σε βιομηχανικές μονάδες Παραγωγής και συναρμολόγησης για να περάσει ένα αντικείμενο από έναν σταθμό συναρμολόγησης σε έναν άλλο. Για Π.χ .: - Μια διαδικασία πλήρωσης μπουκαλιών.
- Σερβο κινητήρας σε ρομποτικό όχημα εδώ ο σερβο κινητήρας που χρησιμοποιείται στους Τροχούς. Δεδομένου ότι χρησιμοποιείται ο σερβο κινητήρας συνεχούς περιστροφής.
Dinesh.P
Εκτελεστικό μάρκετινγκ
 Τα ρομπότ θα εισαχθούν για να μειώσουν τις ανθρώπινες σκληρές δουλειές και να βοηθήσουν στη δημιουργία καλής τύχης στους ανθρώπους για μελλοντικές εξελίξεις. Ο όρος ρομπότ σημαίνει τη μηχανή που μιμείται τα διάφορα ανθρώπινα χαρακτηριστικά. Η ρομποτική περιλαμβάνει τη γνώση της μηχανικής, της ηλεκτρονικής, της ηλεκτρολογίας και της επιστήμης των υπολογιστών. Οι κινητήρες που χρησιμοποιούνται στα ρομπότ είναι DC Motors, Stepper Motors και Servo Motors
Τα ρομπότ θα εισαχθούν για να μειώσουν τις ανθρώπινες σκληρές δουλειές και να βοηθήσουν στη δημιουργία καλής τύχης στους ανθρώπους για μελλοντικές εξελίξεις. Ο όρος ρομπότ σημαίνει τη μηχανή που μιμείται τα διάφορα ανθρώπινα χαρακτηριστικά. Η ρομποτική περιλαμβάνει τη γνώση της μηχανικής, της ηλεκτρονικής, της ηλεκτρολογίας και της επιστήμης των υπολογιστών. Οι κινητήρες που χρησιμοποιούνται στα ρομπότ είναι DC Motors, Stepper Motors και Servo Motors
Που,
- Οι κινητήρες DC χρησιμοποιούνται για συνεχή περιστροφή
- Οι Stepper Motors χρησιμοποιούνται για περιστροφή σε μερικούς βαθμούς
- Τα Servo Motors χρησιμοποιούνται για τοποθέτηση, μπορούν να χρησιμοποιηθούν σε αυτοκίνητα και αεροπλάνα
Ganesh. J
Εκτελεστικό μάρκετινγκ 
Τα ρομπότ χρησιμοποιούνται για να κάνουν τη δουλειά που μπορεί να γίνει από τους ανθρώπους και επίσης μειώνει την ανθρώπινη προσπάθεια και το χρόνο και βελτιώνει την ποιότητα. Οι κινητήρες που χρησιμοποιούνται στη βιομηχανική ρομποτική είναι
- Κινητήρες εναλλασσόμενου ρεύματος (AC)
- Κινητήρες συνεχούς ρεύματος (DC)
- Servo Motors
- Stepper Motors.