Κατά την περίοδο των 18ουαιώνα, υπήρξε η εξέλιξη των κινητήρων DC. Η ανάπτυξη κινητήρων DC έχει βελτιωθεί ευρέως και εφαρμόζονται σημαντικά σε πολλές βιομηχανίες. Στις αρχές της δεκαετίας του 1800 και με τις βελτιώσεις που έγιναν το 1832, οι κινητήρες DC αναπτύχθηκαν αρχικά από τον Βρετανό ερευνητή Sturgeon. Εφευρέθηκε ο αρχικός τύπος κινητήρα DC όπου έχει τη δυνατότητα να προσομοιώνει μηχανήματα. Αλλά μπορεί να αναρωτηθεί κανείς ποια είναι η λειτουργικότητα του κινητήρα DC και γιατί είναι σημαντικό να γνωρίζουμε τον έλεγχο ταχύτητας κινητήρα DC. Έτσι, αυτό το άρθρο εξηγεί με σαφήνεια τη λειτουργία του και διάφορες τεχνικές ελέγχου ταχύτητας.
Τι είναι το DC Motor;
Ένας κινητήρας Dc λειτουργεί χρησιμοποιώντας συνεχές ρεύμα όπου μετατρέπει τη ληφθείσα ηλεκτρική ενέργεια σε μηχανική ενέργεια. Αυτό προκαλεί μια περιστροφική αλλαγή στην ίδια τη συσκευή, παρέχοντας έτσι ισχύ για τη λειτουργία διαφόρων εφαρμογών σε πολλούς τομείς.
Ο έλεγχος ταχύτητας κινητήρα DC είναι ένα από τα πιο χρήσιμα χαρακτηριστικά του κινητήρα. Με τον έλεγχο της ταχύτητας του κινητήρα, μπορείτε να αλλάξετε την ταχύτητα του κινητήρα σύμφωνα με τις απαιτήσεις και να λάβετε την απαιτούμενη λειτουργία.
Ο μηχανισμός ελέγχου ταχύτητας εφαρμόζεται σε πολλές περιπτώσεις, όπως ο έλεγχος της κίνησης των ρομποτικών οχημάτων, η κίνηση των κινητήρων σε χαρτοβιομηχανίες και η κίνηση των κινητήρων σε ανελκυστήρες όπου διαφορετικοί τύποι κινητήρων DC είναι μεταχειρισμένα.
Αρχή λειτουργίας της DC Motor
Ένας απλός κινητήρας DC λειτουργεί με την αρχή ότι όταν ένας αγωγός μεταφοράς ρεύματος τοποθετείται σε ένα μαγνητικός πιστός δ, βιώνει μια μηχανική δύναμη. Σε έναν πρακτικό κινητήρα DC, ο οπλισμός είναι ο αγωγός που φέρει το ρεύμα και το πεδίο παρέχει ένα μαγνητικό πεδίο.
Όταν ο αγωγός (οπλισμός) τροφοδοτείται με ρεύμα, παράγει τη δική του μαγνητική ροή. Η μαγνητική ροή είτε αυξάνει τη μαγνητική ροή λόγω των περιελίξεων πεδίου σε μία κατεύθυνση είτε ακυρώνει τη μαγνητική ροή λόγω των περιελίξεων πεδίου. Η συσσώρευση μαγνητικής ροής προς τη μία κατεύθυνση σε σύγκριση με την άλλη ασκεί δύναμη στον αγωγό και, επομένως, αρχίζει να περιστρέφεται.
Σύμφωνα με το νόμο της ηλεκτρομαγνητικής επαγωγής του Faraday, η περιστρεφόμενη δράση του αγωγού παράγει ένα EMF . Αυτό το EMF, σύμφωνα με το νόμο του Lenz, τείνει να αντιτίθεται στην αιτία, δηλαδή στην παρεχόμενη τάση. Έτσι, ένας κινητήρας DC έχει ένα πολύ ιδιαίτερο χαρακτηριστικό της ρύθμισης της ροπής του σε περίπτωση διαφορετικού φορτίου λόγω του πίσω EMF.
Γιατί ο έλεγχος ταχύτητας κινητήρα DC είναι σημαντικός;
Ο έλεγχος ταχύτητας στο μηχάνημα δείχνει μια επίδραση στην ταχύτητα περιστροφής του κινητήρα όπου αυτή η άμεση επίδραση στη λειτουργικότητα του μηχανήματος και είναι τόσο σημαντική για την απόδοση και το αποτέλεσμα της απόδοσης. Τη στιγμή της γεώτρησης, κάθε είδος υλικού έχει τη δική του ταχύτητα περιστροφής και αλλάζει ανάλογα με το μέγεθος του τρυπανιού.
Στο σενάριο των εγκαταστάσεων αντλίας, θα υπάρξει μια αλλαγή στον ρυθμό απόδοσης και έτσι ένας μεταφορικός ιμάντας πρέπει να είναι συγχρονισμένος με τη λειτουργική ταχύτητα της συσκευής. Αυτοί οι παράγοντες έρχονται είτε άμεσα είτε έμμεσα από την ταχύτητα του κινητήρα. Εξαιτίας αυτού, θα πρέπει να εξετάσουμε την ταχύτητα κινητήρα DC και να παρατηρήσουμε διάφορους τύπους μεθόδων ελέγχου ταχύτητας.
Ο έλεγχος ταχύτητας κινητήρα DC γίνεται είτε χειροκίνητα από τον εργαζόμενο είτε χρησιμοποιώντας οποιοδήποτε αυτόματο εργαλείο ελέγχου. Αυτό φαίνεται να έρχεται σε αντίθεση με τον περιορισμό της ταχύτητας όπου πρέπει να υπάρχει ρύθμιση ταχύτητας που να αντιτίθεται στη φυσική διακύμανση της ταχύτητας λόγω της διακύμανσης στο φορτίο του άξονα.
Η αρχή του ελέγχου ταχύτητας
Από το παραπάνω σχήμα, η εξίσωση τάσης ενός απλού Κινητήρας DC είναι
V = Eb + IaRa
Το V είναι η παρεχόμενη τάση, το Eb είναι το πίσω EMF, το Ia είναι το ρεύμα οπλισμού και το Ra είναι η αντίσταση οπλισμού.
Το γνωρίζουμε ήδη
Eb = (PøNZ) / 60Α.
P - αριθμός πόλων,
Α - σταθερά
Z - αριθμός αγωγών
Ν- η ταχύτητα του κινητήρα
Αντικαθιστώντας την τιμή του Eb στην εξίσωση τάσης, έχουμε
V = (PøNZ) / 60A) + IaRa
Ή, V - IaRa = (PøNZ) / 60A
δηλ., N = (PZ / 60A) (V - IaRa) / ø
Η παραπάνω εξίσωση μπορεί επίσης να γραφτεί ως:
N = K (V - IaRa) / ø, το K είναι μια σταθερά
Αυτό συνεπάγεται τρία πράγματα:
- Η ταχύτητα του κινητήρα είναι άμεσα ανάλογη με την τάση τροφοδοσίας.
- Η ταχύτητα του κινητήρα είναι αντιστρόφως ανάλογη με την πτώση τάσης οπλισμού.
- Η ταχύτητα του κινητήρα είναι αντιστρόφως ανάλογη με τη ροή λόγω των ευρημάτων πεδίου
Έτσι, η ταχύτητα ενός κινητήρα DC μπορεί να ελεγχθεί με τρεις τρόπους:
- Μεταβάλλοντας την τάση τροφοδοσίας
- Μεταβάλλοντας τη ροή και μεταβάλλοντας το ρεύμα μέσω της περιέλιξης πεδίου
- Μεταβάλλοντας την τάση του οπλισμού και μεταβάλλοντας την αντίσταση του οπλισμού
Πολλαπλές τεχνικές ελέγχου ταχύτητας κινητήρα DC
Δεδομένου ότι υπάρχουν δύο τύποι κινητήρων DC, εδώ θα συζητήσουμε με σαφήνεια τις μεθόδους ελέγχου ταχύτητας και των δύο σειρών DC και κινητήρες διακλάδωσης.
Έλεγχος ταχύτητας κινητήρα DC σε τύπους σειρών
Μπορεί να κατηγοριοποιηθεί σε δύο τύπους και είναι:
- Τεχνική ελεγχόμενης οπλισμού
- Τεχνική ελεγχόμενου πεδίου
Η τεχνική ελεγχόμενου οπλισμού ταξινομείται περαιτέρω σε τρεις τύπους
- Ελεγχόμενη αντίσταση οπλισμού
- Απομακρυσμένος έλεγχος οπλισμού
- Τάση τερματικού οπλισμού
Ελεγχόμενη αντίσταση οπλισμού
Αυτή η τεχνική χρησιμοποιείται ευρύτερα όταν η αντίσταση ρύθμισης έχει μια σειρά σύνδεσης με αυτήν της παροχής κινητήρα. Η παρακάτω εικόνα το εξηγεί.

Έλεγχος αντίστασης οπλισμού
Η απώλεια ισχύος που συμβαίνει στην αντίσταση ελέγχου του κινητήρα της σειράς DC μπορεί να αγνοηθεί επειδή αυτή η τεχνική ρύθμισης χρησιμοποιείται ως επί το πλείστον για μεγάλο χρονικό διάστημα προκειμένου να μειωθεί η ταχύτητα κατά τη στιγμή των σεναρίων φόρτωσης φωτός. Είναι μια οικονομικά αποδοτική τεχνική για επίμονη ροπή και εφαρμόζεται κυρίως σε οδηγούς γερανούς, τρένα και άλλα οχήματα.
Shunted Armature Control
Εδώ, ο ρεοστάτης θα είναι και σε δύο σειρές και σε σχέση με το οπλισμό. Θα υπάρξει αλλαγή στο επίπεδο τάσης που εφαρμόζεται στον οπλισμό και αυτό ποικίλλει αλλάζοντας τη σειρά ρυθμιστής ηλεκτρικού ρεύματος . Ενώ η αλλαγή στο ρεύμα διέγερσης λαμβάνει χώρα με αλλαγή του ρεοστάτη shunt. Αυτή η τεχνική ελέγχου της ταχύτητας στον κινητήρα συνεχούς ρεύματος δεν είναι τόσο δαπανηρή λόγω σημαντικών απωλειών ισχύος στις αντιστάσεις ρύθμισης ταχύτητας. Η ταχύτητα μπορεί να ρυθμιστεί σε κάποιο βαθμό αλλά όχι πάνω από το κανονικό επίπεδο ταχύτητας.

Μέθοδος ελέγχου ταχύτητας κινητήρα DC Shunted Armature
Τάση τερματικού οπλισμού
Η ταχύτητα ενός κινητήρα σειράς DC μπορεί επίσης να πραγματοποιηθεί μέσω τροφοδοσίας ρεύματος στον κινητήρα χρησιμοποιώντας μια μεμονωμένη ποικίλη τάση τροφοδοσίας, αλλά αυτή η προσέγγιση είναι δαπανηρή και δεν εφαρμόζεται εκτενώς.
Η τεχνική που ελέγχεται από το πεδίο ταξινομείται περαιτέρω σε δύο τύπους:
- Εκτροπέας πεδίου
- Έλεγχος του κτυπημένου πεδίου (Έλεγχος πεδίου)
Τεχνική εκτροπής πεδίου
Αυτή η τεχνική χρησιμοποιεί έναν εκτροπέα. Ο ρυθμός ροής που βρίσκεται σε όλο το πεδίο μπορεί να μειωθεί περνώντας ένα μέρος του ρεύματος του κινητήρα στο πεδίο της σειράς. Όσο μικρότερη είναι η αντίσταση του μετατροπέα, το ρεύμα πεδίου είναι μικρότερο. Αυτή η τεχνική χρησιμοποιείται για περισσότερο από το κανονικό εύρος στροφών και εφαρμόζεται σε ηλεκτρικές μονάδες όπου η ταχύτητα αυξάνεται όταν υπάρχει μείωση του φορτίου.

Έλεγχος ταχύτητας κινητήρα DC Diverter Field
Έλεγχος του κτυπημένου πεδίου
Εδώ επίσης, με τη μείωση της ροής, η ταχύτητα θα αυξηθεί και επιτυγχάνεται μειώνοντας τις στροφές περιέλιξης πεδίου από όπου πραγματοποιείται η ροή του ρεύματος. Εδώ, αφαιρείται ο αριθμός των κρουσμάτων στο τύλιγμα πεδίου και αυτή η τεχνική χρησιμοποιείται σε ηλεκτρικές έλξεις.
Έλεγχος ταχύτητας DC Shunt Motor
Μπορεί να κατηγοριοποιηθεί σε δύο τύπους και είναι:
- Τεχνική ελεγχόμενου πεδίου
- Τεχνική ελεγχόμενης οπλισμού
Μέθοδος ελέγχου πεδίου για DC Shunt Motor
Σε αυτήν τη μέθοδο, η μαγνητική ροή λόγω των περιελίξεων πεδίου ποικίλλει προκειμένου να μεταβάλλεται η ταχύτητα του κινητήρα.
Καθώς η μαγνητική ροή εξαρτάται από το ρεύμα που ρέει μέσω της περιέλιξης πεδίου, μπορεί να μεταβάλλεται μεταβάλλοντας το ρεύμα μέσω της περιέλιξης πεδίου. Αυτό μπορεί να επιτευχθεί χρησιμοποιώντας μια μεταβλητή αντίσταση σε σειρά με την αντίσταση περιέλιξης πεδίου.
Αρχικά, όταν η μεταβλητή αντίσταση διατηρείται στην ελάχιστη θέση της, το ονομαστικό ρεύμα ρέει μέσω του τυλίγματος πεδίου λόγω της ονομαστικής τάσης τροφοδοσίας, και ως αποτέλεσμα, η ταχύτητα διατηρείται κανονική. Όταν η αντίσταση αυξάνεται σταδιακά, το ρεύμα μέσω της περιέλιξης πεδίου μειώνεται. Αυτό με τη σειρά του μειώνει την παραγόμενη ροή. Έτσι, η ταχύτητα του κινητήρα αυξάνεται πέρα από την κανονική του τιμή.
Μέθοδος ελέγχου αντίστασης οπλισμού για DC Shunt Motor
Με αυτήν τη μέθοδο, η ταχύτητα του κινητήρα DC μπορεί να ελεγχθεί ελέγχοντας την αντίσταση του οπλισμού για να ελέγξει την πτώση τάσης κατά μήκος του οπλισμού. Αυτή η μέθοδος χρησιμοποιεί επίσης μια μεταβλητή αντίσταση σε σειρά με το οπλισμό.
Όταν η μεταβλητή αντίσταση φτάσει την ελάχιστη τιμή της, η αντίσταση του οπλισμού είναι σε κανονική, και επομένως, η τάση του οπλισμού μειώνεται. Όταν η τιμή αντίστασης αυξάνεται σταδιακά, μειώνεται η τάση στο οπλισμό. Αυτό με τη σειρά του οδηγεί σε μείωση της ταχύτητας του κινητήρα.
Αυτή η μέθοδος επιτυγχάνει την ταχύτητα του κινητήρα κάτω από το κανονικό εύρος.
Μέθοδος ελέγχου τάσης οπλισμού για DC Shunt Motor (Μέθοδος Ward Leonard)
Η τεχνική του Ward Leonard του Κύκλωμα ελέγχου ταχύτητας κινητήρα DC εμφανίζεται ως εξής:
Στην παραπάνω εικόνα, το Μ είναι ο κύριος κινητήρας όπου η ταχύτητά του πρόκειται να ρυθμιστεί και το G αντιστοιχεί σε μια ατομικά διεγερμένη γεννήτρια DC όπου αυτό οδηγείται χρησιμοποιώντας έναν τριφασικό κινητήρα και μπορεί να είναι είτε συγχρονισμένος είτε επαγωγικός κινητήρας. Αυτό το μοτίβο συνδυασμού γεννήτριας DC και κινητήρα εναλλασσόμενου ρεύματος ονομάζεται σετ M-G.
Η τάση της γεννήτριας μεταβάλλεται αλλάζοντας το ρεύμα πεδίου της γεννήτριας. Αυτό το επίπεδο τάσης όταν παρέχεται στο τμήμα οπλισμού του κινητήρα DC και μετά το Μ ποικίλλει. Προκειμένου να διατηρηθεί η ροή του πεδίου κινητήρα σταθερή, το ρεύμα πεδίου κινητήρα πρέπει να διατηρείται ως σταθερό. Όταν η ταχύτητα του κινητήρα ρυθμίζεται, τότε το ρεύμα οπλισμού του κινητήρα πρέπει να είναι το ίδιο με αυτό του ονομαστικού επιπέδου.
Το ρεύμα πεδίου που παραδίδεται θα είναι διαφορετικό, ώστε το επίπεδο οπλισμού της τάσης να κυμαίνεται από «0» έως το ονομαστικό επίπεδο. Καθώς η ρύθμιση ταχύτητας αντιστοιχεί στο ονομαστικό ρεύμα και με την επίμονη ροή πεδίου του κινητήρα και τη ροή πεδίου έως ότου επιτευχθεί η ονομαστική ταχύτητα. Και καθώς η ισχύς είναι προϊόν ταχύτητας και ροπής και έχει άμεση αναλογία με την ταχύτητα. Με αυτό, όταν υπάρχει αύξηση της ισχύος, η ταχύτητα αυξάνεται.
Και οι δύο προαναφερθείσες μέθοδοι δεν μπορούν να παρέχουν έλεγχο ταχύτητας στην επιθυμητή περιοχή. Επιπλέον, η μέθοδος ελέγχου ροής μπορεί να επηρεάσει την αλλαγή, ενώ η μέθοδος ελέγχου οπλισμού συνεπάγεται τεράστια απώλεια ισχύος λόγω της χρήσης της αντίστασης σε σειρά με τον οπλισμό. Επομένως, είναι συχνά επιθυμητή μια διαφορετική μέθοδος - αυτή που ελέγχει την τάση τροφοδοσίας για τον έλεγχο της ταχύτητας του κινητήρα.
Κατά συνέπεια, με την τεχνική Ward Leonard, ο ρυθμιζόμενος κινητήρας ισχύος και η σταθερή τιμή ροπής λαμβάνονται από το ελάχιστο επίπεδο ταχύτητας στο επίπεδο της ταχύτητας βάσης. Η τεχνική ρύθμισης ροής πεδίου χρησιμοποιείται κυρίως όταν το επίπεδο ταχύτητας είναι μεγαλύτερο από αυτό της βασικής ταχύτητας.
Εδώ, στη λειτουργικότητα, το ρεύμα οπλισμού διατηρείται σε σταθερό επίπεδο στην καθορισμένη τιμή και η τιμή τάσης της γεννήτριας διατηρείται σε σταθερά. Σε μια τέτοια μέθοδο, η περιέλιξη πεδίου λαμβάνει μια σταθερή τάση και ο οπλισμός παίρνει μια μεταβλητή τάση.
Μία τέτοια τεχνική της μεθόδου ελέγχου τάσης περιλαμβάνει τη χρήση ενός μηχανισμού διακοπής για την παροχή μεταβλητής τάσης στον οπλισμό και η άλλη χρησιμοποιεί μια γεννήτρια με κινητήρα εναλλασσόμενου ρεύματος για την παροχή μεταβλητής τάσης στο οπλισμό (η Σύστημα Ward-Leonard ).
ο πλεονεκτήματα και μειονεκτήματα της μεθόδου Leonard δ είναι:
Τα οφέλη από τη χρήση της τεχνικής Ward Leonard για έλεγχο ταχύτητας κινητήρα DC είναι τα εξής:
- Και στις δύο κατευθύνσεις, μπορεί κανείς να ελέγξει την ταχύτητα της συσκευής με ομαλό τρόπο για εκτεταμένο εύρος
- Αυτή η τεχνική έχει εγγενή ικανότητα πέδησης
- Τα πίσω ενεργά βολτ-αμπέρ αντισταθμίζονται μέσω μιας μονάδας δίσκου και ο εξαιρετικά διεγερμένος σύγχρονος κινητήρας ενεργεί ως κίνηση, οπότε θα υπάρξει αύξηση του συντελεστή ισχύος
- Όταν υπάρχει φορτίο που αναβοσβήνει, ο κινητήρας κίνησης είναι το επαγωγικός κινητήρας έχοντας σφόνδυλο που χρησιμοποιείται για τη μείωση του φορτίου που αναβοσβήνει σε ελάχιστο επίπεδο
Τα μειονεκτήματα της τεχνικής Ward Leonard είναι:
- Επειδή αυτή η τεχνική έχει ένα σύνολο κινητήρα και γεννήτριας, το κόστος είναι περισσότερο
- Η συσκευή είναι περίπλοκη στο σχεδιασμό και έχει επίσης βαρέων βαρών
- Χρειάζεστε περισσότερο χώρο για εγκατάσταση
- Απαιτείται τακτική συντήρηση και το θεμέλιο δεν είναι οικονομικό
- Θα υπάρξουν τεράστιες απώλειες και έτσι η απόδοση του συστήματος μειώνεται
- Παράγεται περισσότερος θόρυβος
Και το εφαρμογή της μεθόδου Ward Leonard είναι ομαλός έλεγχος της ταχύτητας στον κινητήρα DC. Μερικά από τα παραδείγματα είναι ανυψωτικά ορυχεία, μύλοι χαρτιού, ανελκυστήρες, τροχοφόροι και γερανοί.
Εκτός από αυτές τις δύο τεχνικές, η πιο ευρέως χρησιμοποιούμενη τεχνική είναι η έλεγχος ταχύτητας κινητήρα dc με χρήση PWM για να επιτύχετε έλεγχο ταχύτητας ενός κινητήρα DC. Το PWM περιλαμβάνει την εφαρμογή παλμών ποικίλου πλάτους στον οδηγό κινητήρα για τον έλεγχο της τάσης που εφαρμόζεται στον κινητήρα. Αυτή η μέθοδος αποδεικνύεται πολύ αποτελεσματική καθώς η απώλεια ισχύος διατηρείται στο ελάχιστο και δεν περιλαμβάνει τη χρήση οποιουδήποτε πολύπλοκου εξοπλισμού.

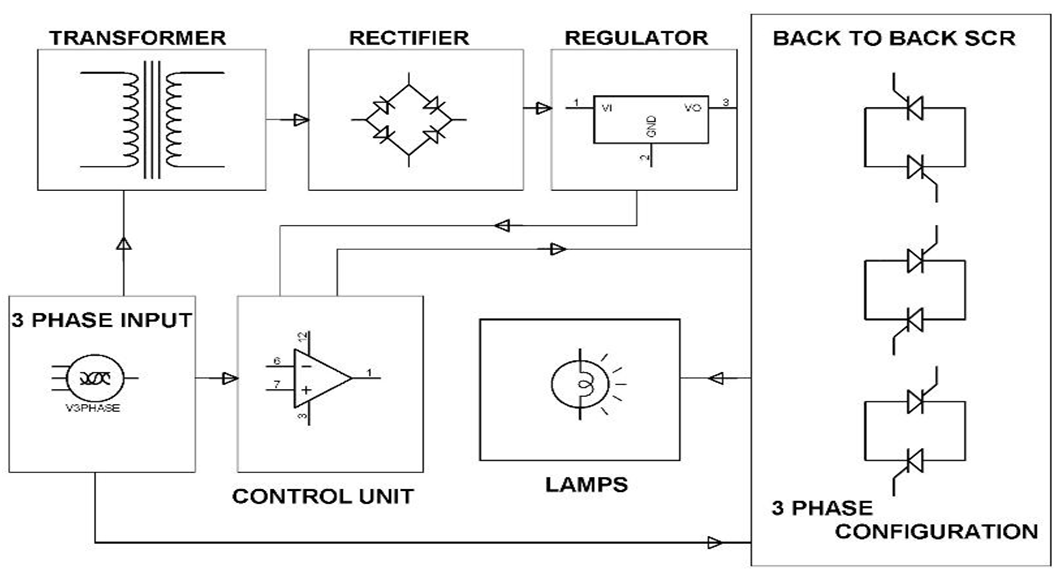
Μέθοδος ελέγχου τάσης
Το παραπάνω διάγραμμα μπλοκ αντιπροσωπεύει ένα απλό ελεγκτής ταχύτητας ηλεκτρικού κινητήρα . Όπως απεικονίζεται στο παραπάνω διάγραμμα μπλοκ, ένας μικροελεγκτής χρησιμοποιείται για την τροφοδοσία σημάτων PWM στον οδηγό του κινητήρα. Ο οδηγός κινητήρα είναι ένα L293D IC που αποτελείται από κυκλώματα H-Bridge για την κίνηση του κινητήρα.
Το PWM επιτυγχάνεται μεταβάλλοντας τους παλμούς που εφαρμόζονται στον πείρο ενεργοποίησης του IC οδηγού κινητήρα για τον έλεγχο της εφαρμοζόμενης τάσης του κινητήρα. Η παραλλαγή των παλμών γίνεται από τον μικροελεγκτή, με το σήμα εισόδου από τα κουμπιά. Εδώ, παρέχονται δύο μπουτόν, το καθένα για μείωση και αύξηση του κύκλου λειτουργίας των παλμών.
Έτσι, αυτό το άρθρο έχει δώσει μια λεπτομερή εξήγηση για διάφορες τεχνικές ελέγχου ταχύτητας κινητήρα DC και πώς ο έλεγχος ταχύτητας είναι πιο σημαντικός για να τηρηθεί. Συνιστάται επίσης να γνωρίζετε ο ελεγκτής ταχύτητας κινητήρα 12v dc .