Παρόλο που τα κυκλώματα τηλεχειριστηρίου quadcopter μπορούν να προμηθευτούν πολύ εύκολα από την αγορά ή από οποιοδήποτε ηλεκτρονικό κατάστημα, δεν επιτρέπεται ποτέ ένας άπληστος ηλεκτρονικός χόμπι να μάθει πώς λειτουργούν πραγματικά αυτά και αν αυτά μπορούν να κατασκευαστούν στο σπίτι ή όχι;
Σε αυτό το άρθρο θα προσπαθήσουμε να δημιουργήσουμε ένα απλό κύκλωμα τηλεχειριστηρίου quadcopter χρησιμοποιώντας διακριτά εξαρτήματα και χρησιμοποιώντας μονάδες τηλεχειριστηρίου RF, και χωρίς τη συμμετοχή των σύνθετων κυκλωμάτων που βασίζονται σε MCU.
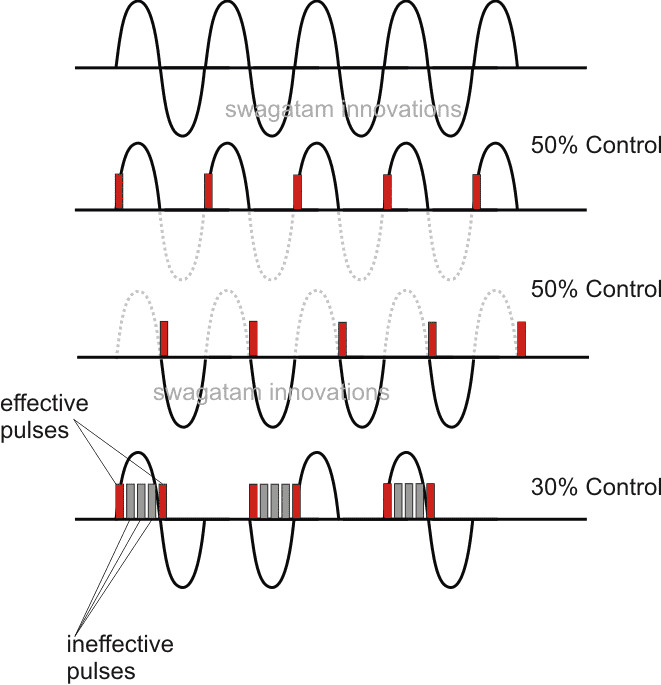
Ο βήμα προς βήμα οδηγός θα κάνει πραγματικά τους ενδιαφερόμενους χομπίστες να κατανοήσουν πόσο απλά μπορεί να ελεγχθεί ένα quadcopter χρησιμοποιώντας μια ιδέα PWM.
Έχουμε ήδη μάθει τα βασικά quadcopter , τώρα ας ερευνήσουμε μια ενότητα τηλεχειριστηρίου που τελικά θα βοηθήσει να πετάξετε τη μονάδα από απόσταση.
Απαιτούνται βασικές ενότητες
Τα κύρια συστατικά που μπορεί να απαιτούνται για το έργο δίνονται ως εξής:
Θα απαιτήσουμε βασικά τα ακόλουθα 3 στάδια κυκλώματος:
1) 4 κατευθύνσεις RF τηλεχειριστήριο Tx, Rx ενότητες - 1set
2) Κυκλώματα γεννήτριας PWM με βάση το IC 555 - 4nos
3) Κυκλώματα ελεγκτή κινητήρα BLDC - 4nos
Δεδομένου ότι είναι μια σπιτική έκδοση, μπορούμε να αναμένουμε κάποιες ανεπάρκειες με τον προτεινόμενο σχεδιασμό, όπως η απουσία χειριστηρίων για τα χειριστήρια, τα οποία αντικαθίστανται με δοχεία ή ποτενσιόμετρα, ωστόσο η αναμενόμενη ικανότητα του συστήματος να είναι ισοδύναμη με την επαγγελματικές μονάδες.
Η μονάδα πομπού χειρός PWM θα αποτελείται βασικά από την απομακρυσμένη μονάδα Tx που είναι ενσωματωμένη σε 4 διακριτά κυκλώματα ελέγχου PWM, ενώ το τετραπλό θα πρέπει να περικλείεται με κύκλωμα 1 Rx ενσωματωμένο με 4 διακριτά κυκλώματα οδηγού BLDC.
Ας ξεκινήσουμε με τα κυκλώματα κινητήρα quadcopter και να δούμε πώς πρέπει να ρυθμιστεί και να συνδεθεί το χειριστήριο κινητήρα BLDC με το κύκλωμα Rx.
Κύκλωμα δέκτη Quadcopter PWM
Σε μια από τις προηγούμενες δημοσιεύσεις μάθαμε πώς θα μπορούσε να κατασκευαστεί ένας ευέλικτος ελεγκτής κινητήρα BLDC χρησιμοποιώντας ένα τσιπ, ωστόσο αυτός ο σχεδιασμός δεν έχει σχεδιαστεί για να λειτουργεί σχετικά βαρύτερους κινητήρες ενός τετρακόπτη, επομένως μπορεί να μην είναι κατάλληλος για την παρούσα εφαρμογή.
Μια επιλογή «μεγάλου αδελφού» για το παραπάνω κύκλωμα είναι ευτυχώς διαθέσιμη και καθίσταται απόλυτα κατάλληλη για την οδήγηση κινητήρων quadcopter. Χάρη στα TEXAS INSTRUMENTS, που μας παρείχαν τέτοιες υπέροχες μονάδες κυκλωμάτων με συγκεκριμένη εφαρμογή.
Για να μάθετε περισσότερα σχετικά με αυτό το υψηλό τρέχον IC προγράμματος οδήγησης BLDC, μπορείτε να ανατρέξετε στο παρακάτω φύλλο δεδομένων του ίδιου pdf
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Το παρακάτω σχήμα δείχνει το πλήρες σχηματικό κύκλωμα του ελεγκτή οδηγού κινητήρα quadcopter χρησιμοποιώντας το DRV11873 IC που είναι ένα αυτόνομο κύκλωμα κινητήρα χαμηλού ρεύματος BLDC που αποτελείται από όλα τα απαιτούμενα χαρακτηριστικά προστασίας, όπως προστασία από υπερφόρτωση, θερμική προστασία κ.λπ. Αυτή η μονάδα σχηματίζει βασικά το ESC για την παρούσα μονάδα quadcopter.
Για περισσότερες πληροφορίες σχετικά με αυτό το σχέδιο και τις λεπτομέρειες PCB, μπορείτε να ανατρέξετε στο αρχικό έγγραφο παρακάτω:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Πως δουλεύει
Οι συνδέσεις FS και FG του IC προορίζονται για ενίσχυση του IC με πρόσθετα χειριστήρια μέσω εξωτερικών κυκλωμάτων, καθώς δεν χρησιμοποιούμε αυτά τα χαρακτηριστικά στο σχεδιασμό μας, αυτές οι ακίδες μπορεί να διατηρηθούν αχρησιμοποίητες και να τερματιστούν στη θετική γραμμή μέσω αντίστασης 100K.
Το RD pinout του IC αποφασίζει την περιστροφική κατεύθυνση του κινητήρα. Η σύνδεση αυτού του πείρου σε Vcc μέσω αντίστασης 100K επιτρέπει μια περιστροφή αριστερόστροφα στον κινητήρα, ενώ αφήνεται να μην είναι συνδεδεμένη κάνει το αντίθετο και επιτρέπει στον κινητήρα να περιστρέφεται προς τη φορά των δεικτών του ρολογιού.
Το Pin # 16 είναι η είσοδος PWM που χρησιμοποιείται για την έγχυση εισόδου PWM από εξωτερική πηγή, μεταβάλλοντας τον κύκλο λειτουργίας του PWM αλλάζει αντίστοιχα την ταχύτητα του κινητήρα.
Οι συνδέσεις FR, CS είναι επίσης άσχετες με την ανάγκη και μπορεί επομένως να αφεθούν αχρησιμοποίητες όπως φαίνεται στο διάγραμμα και να τερματιστούν στη θετική γραμμή μέσω αντίστασης 100Κ.
Οι U, V, W pinouts είναι οι έξοδοι κινητήρα που πρέπει να συνδεθούν με τον αντίστοιχο τριφασικό κινητήρα BLDC quadcopter.
Το pin pin COM είναι για τη σύνδεση του κοινού καλωδίου του τριφασικού κινητήρα, εάν ο κινητήρας σας δεν έχει κοινό καλώδιο, μπορείτε απλά να το προσομοιώσετε συνδέοντας 3 αριθμούς αντιστάσεων 2k2 στους ακροδέκτες U, W, W και στη συνέχεια συνδέστε τους τελειώνει με τον πείρο COM του IC.
Το σχηματικό δείχνει επίσης ένα IC 555 που έχει διαμορφωθεί σε λειτουργία ασφάλτου κυκλώματος PWM Αυτό γίνεται μέρος της μονάδας κυκλώματος και η έξοδος PWM από τον πείρο # 7 μπορεί να φανεί συνδεδεμένη με την είσοδο PWM του κυκλώματος DRV IC προκειμένου να εκκινήσει τους 4 κινητήρες με σταθερή ταχύτητα βάσης και να επιτρέψει στον κινητήρα μια συνεχή αιωρούμενη ταχύτητα σε ένα δεδομένο σημείο.
Αυτό ολοκληρώνει το κύριο κύκλωμα ELC ή το κύκλωμα οδηγού BLDC για σχεδιασμό quadcopter.
Θα χρειαζόμαστε τέσσερις τέτοιες μονάδες για τους τέσσερις κινητήρες στο σχεδιασμό quadcopter μας.
Δηλαδή, 4 τέτοια DRV IC μαζί με το IC 555 PWM stage θα πρέπει να συσχετιστούν με καθένα από τους 4 κινητήρες του quadcopter.
Αυτές οι μονάδες διασφαλίζουν ότι κανονικά και οι 4 κινητήρες είναι ρυθμισμένοι σε μια προκαθορισμένη ταχύτητα εφαρμόζοντας ένα σταθερό και πανομοιότυπο σήμα PWM σε καθένα από τα αντίστοιχα IC ελεγκτή DRV.
Τώρα ας μάθουμε πώς μπορεί να αλλάξει το PWM μέσω ενός τηλεχειριστηρίου προκειμένου να αλλάξει τις ταχύτητες του μεμονωμένου κινητήρα χρησιμοποιώντας ένα συνηθισμένο τηλεχειριστήριο 4 καναλιών.
Η μονάδα δέκτη RF (αποκωδικοποιητής PWM)

Το παραπάνω κύκλωμα δείχνει το απομακρυσμένο κύκλωμα RF του δέκτη, το οποίο υποτίθεται ότι θα φιλοξενηθεί εντός του τετραπλού για τη λήψη εξωτερικών ασύρματων δεδομένων PWM από το ακουστικό απομακρυσμένου πομπού του χρήστη και στη συνέχεια επεξεργάζεται τα σήματα κατάλληλα για να τροφοδοτήσει τις συνοδευτικές μονάδες ελεγκτή DRV όπως εξηγείται στο προηγούμενη ενότητα.
Οι 4 έξοδοι που ονομάζονται PWM # 1… .PWM # 4 πρέπει να συνδεθούν με τον ακροδέκτη PWM # 15 του DRV IC όπως υποδεικνύεται στο προηγούμενο διάγραμμα.
Αυτά τα PWM pinouts από τη μονάδα δέκτη RF ενεργοποιούνται κάθε φορά που πατάτε το αντίστοιχο κουμπί από το χρήστη στο ακουστικό του πομπού.
Πώς πρέπει να είναι ενσύρματο ο πομπός RF (PWM Encoder)
Στην παραπάνω ενότητα συζητήσαμε το κύκλωμα Rx ή τον απομακρυσμένο δέκτη και τον τρόπο με τον οποίο πρέπει να συνδεθούν οι 4 εξόδους του με τις μονάδες οδηγού ESC του κινητήρα quadcopter.
Εδώ βλέπουμε πώς πρέπει να δημιουργηθεί και να συνδεθεί ο απλός πομπός RF με κυκλώματα PWM για την ασύρματη μετάδοση των δεδομένων PWM στη μονάδα δέκτη τετρακόπτη έτσι ώστε οι ταχύτητες του μεμονωμένου κινητήρα να ελέγχονται απλά με το πάτημα ενός κουμπιού, το οποίο τελικά προκαλεί την quadcopter για να αλλάξετε κατεύθυνση ή την ταχύτητά του, σύμφωνα με τις προτιμήσεις των χρηστών.

Το κύκλωμα που φαίνεται παραπάνω δείχνει τις λεπτομέρειες καλωδίωσης της μονάδας πομπού. Η ιδέα φαίνεται αρκετά απλή, το κύριο κύκλωμα πομπού σχηματίζεται από το τσιπ TSW434 που μεταδίδει τα κωδικοποιημένα σήματα PWM στην ατμόσφαιρα και το HT12E που καθίσταται υπεύθυνο για την τροφοδοσία των κωδικοποιημένων σημάτων στο τσιπ TSW.
Τα σήματα PWM δημιουργούνται από 4 ξεχωριστά στάδια κυκλώματος IC 555 τα οποία μπορεί να είναι πανομοιότυπα με αυτά που συζητήθηκαν προηγουμένως στην ενότητα ελεγκτή DRV.
Τα περιεχόμενα PWM των 4 ICs φαίνονται να τερματίζονται στα αντίστοιχα pinouts του κωδικοποιητή IC HT12E μέσω 4 διακριτών πλήκτρων που υποδεικνύονται ως SW1 ---- SW4.
Κάθε ένα από αυτά τα κουμπιά αντιστοιχεί και αλλάζει το ίδιο pinout της μονάδας δέκτη που συζητήσαμε νωρίτερα και υποδείξαμε ως PWM # 1, PWM # 2… ..PWM # 4.
Αυτό σημαίνει ότι το πάτημα του SW1 μπορεί να προκαλέσει ενεργή την έξοδο PWM # 1 της μονάδας δέκτη και αυτό θα αρχίσει να τροφοδοτεί τα ληφθέντα αποκωδικοποιημένα σήματα PWM από τον πομπό στη σχετική μονάδα DRV και με τη σειρά του να αναγκάσει τον σχετικό κινητήρα να αλλάξει ανάλογα την ταχύτητά του.
Παρομοίως, η συμπίεση SW2,3,4 μπορεί να χρησιμοποιηθεί για να επηρεάσει τις ταχύτητες των άλλων 3 κινητήρων quadcopter σύμφωνα με τις επιθυμίες των χρηστών.
Κύκλωμα IC 555 PWM
Τα 4 κυκλώματα PWM που φαίνονται στο παραπάνω ακουστικό πομπού RF μπορούν να κατασκευαστούν με αναφορά στο ακόλουθο διάγραμμα, το οποίο είναι ακριβώς παρόμοιο με αυτό που είδαμε το κύκλωμα ESC ελεγκτή DRV.

Θυμηθείτε ότι το δοχείο 5Κ θα μπορούσε να έχει τη μορφή ενός συνηθισμένου ποτ και αυτό το δοχείο θα μπορούσε να χρησιμοποιηθεί επιπλέον με τα κουμπιά για την επιλογή διαφορετικών ταχυτήτων στους αντίστοιχους κινητήρες.
Σημασία διατηρώντας πατημένο ένα επιλεγμένο κουμπί και ταυτόχρονα μετακινώντας το αντίστοιχο 5KPWMpot, κάποιος μπορεί να προκαλέσει το quadcopter να αυξήσει ή να μειώσει την ταχύτητά του στην επιθυμητή κατεύθυνση.
Εναλλακτικά, το PWM θα μπορούσε αρχικά να ρυθμιστεί σε κάποιο υψηλότερο ή χαμηλότερο επίπεδο και στη συνέχεια να πατηθεί το αντίστοιχο κουμπί για να επιτρέψει στον αντίστοιχο κινητήρα quadcopter να επιτύχει την προτιμώμενη ταχύτητα, σύμφωνα με τη ρύθμιση PWM.
Προδιαγραφή κινητήρα Quadcopter
Το παραπάνω εξηγημένο κύκλωμα τηλεχειριστηρίου Qiadcopter προορίζεται να χρησιμοποιηθεί μόνο για σκοπούς προβολής και δεν μπορεί να χρησιμοποιηθεί για την ανύψωση φορτίων ή κάμερας. Αυτό σημαίνει ότι οι κινητήρες που χρησιμοποιούνται στο σχεδιασμό πρέπει κατά προτίμηση να είναι τύπου χαμηλού ρεύματος.
Το DRV11873 IC έχει σχεδιαστεί για να λειτουργεί με κινητήρα ονομαστικής ισχύος 15V, 1,5 amp ή περίπου 20 watt κινητήρα ... έτσι ώστε οποιοσδήποτε τριφασικός κινητήρας BLDC με ονομαστική τιμή 15 έως 30 watt μπορεί να χρησιμοποιηθεί για το σκοπό αυτό.
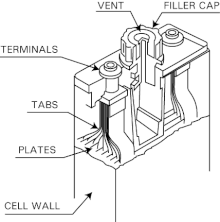
Η μπαταρία για αυτόν τον σχεδιασμό quadcopter μπορεί να είναι οποιαδήποτε μπαταρία 12 ιντσών Lipo pr Li-ion ικανή να παρέχει μέγιστη ισχύ 15V σε συνεχές ρεύμα 1,5 amp.
Λεπτομέρειες προδιαγραφών
1306N Brushless Outrunner Miniature DC Motor
Τύπος: Μικροκινητήρας
Κατασκευή: Μόνιμος μαγνήτης
Μετατροπή: χωρίς ψήκτρες
Ταχύτητα (RPM): 2200rpm / v
Συνεχές ρεύμα (A): 1.5 ~ 2.6A
Τάση (V): 7,4 ~ 11,1V
μικροσκοπικός κινητήρας dc: AX-1306N
βάρος: 8g
διάμετρος του άξονα: 1,5 mm
Μπαταρία LI-PO: 2-3s
ρεύμα λειτουργίας: 1.5 ~ 2.6A
μέγιστη απόδοση: 67%

Προηγούμενο: Κύκλωμα οδηγού κινητήρα BLDC Sensorless Επόμενο: Κύκλωμα ελεγκτή θερμαντήρα χρησιμοποιώντας κουμπιά