Σε αυτό το έργο θα μάθουμε πώς να φτιάχνουμε ένα απλό μονοπολικό κύκλωμα οδηγού κινητήρα stepper χρησιμοποιώντας 555 χρονοδιακόπτη IC. Εκτός από το χρονοδιακόπτη 555 χρειαζόμαστε επίσης IC CD 4017 που είναι μετρητής IC δεκαετίας.
Από τον Ankit Negi
Οποιοσδήποτε μονοπολικός κινητήρας μπορεί να συνδεθεί σε αυτό το κύκλωμα για την εκτέλεση συγκεκριμένης εργασίας, αν και πρέπει πρώτα να κάνετε μερικές μικρές αλλαγές.
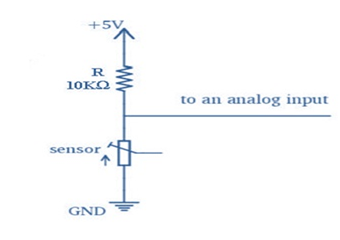
Η ταχύτητα του βηματικού κινητήρα μπορεί να ελεγχθεί από ένα ποτενσιόμετρο συνδεδεμένο μεταξύ εκφόρτισης και κατωφλίου ακροδέκτης 555 χρονοδιακόπτη .
Βασικά στοιχεία κινητήρα Stepper
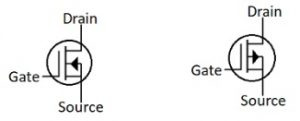
Οι κινητήρες Stepper χρησιμοποιούνται σε περιοχές όπου απαιτείται μια συγκεκριμένη ποσότητα περιστροφής, που δεν είναι εφικτή με τη χρήση συνηθισμένων κινητήρων d.c. Μια τυπική εφαρμογή του stepper motor είναι σε 3D PRINTER. Θα βρείτε δύο τύπους δημοφιλούς κινητήρα stepper: UNIPOLAR και BIPOLAR.
Όπως υποδηλώνει το όνομα, ο μονοπολικός βηματικός κινητήρας περιέχει περιελίξεις με κοινό σύρμα που μπορούν εύκολα να ενεργοποιηθούν ένα προς ένα.
Ενώ ο διπολικός βηματικός κινητήρας δεν έχει κοινό ακροδέκτη μεταξύ των πηνίων λόγω του οποίου δεν μπορεί να κινηθεί απλώς χρησιμοποιώντας το προτεινόμενο κύκλωμα. Για την οδήγηση του διπολικού βηματικού κινητήρα χρειαζόμαστε ένα κύκλωμα h-bridge.
ΣΥΣΤΑΤΙΚΑ:
1. 555 χρονόμετρο IC

δύο. CD 4017 IC

3. ΑΝΤΙΣΤΑΣΕΙΣ 4.7K, 1K


4. ΠΟΤΕΝΣΙΟΜΕΤΡΟ 220K

5. 1 uf CAPACITOR

6. 4 ΔΙΟΔΕΣ 1N4007

7. 4 ΜΕΤΑΦΟΡΤΕΣ 2Ν2222

8. ΜΟΝΟΦΟΡΙΚΟΣ ΜΗΧΑΝΟΣ STEPPER

9. ΠΗΓΗ DC POWER
ΣΚΟΠΟΣ 555 ΧΡΟΝΟΥ:
Απαιτείται χρονοδιακόπτης 555 για τη δημιουργία παλμών ρολογιού συγκεκριμένης συχνότητας (μπορεί να μεταβληθεί χρησιμοποιώντας ποτ 220k) που καθορίζει την ταχύτητα του κινητήρα stepper.
IC 555 Pinout λεπτομέρειες

ΣΚΟΠΟΣ CD4017:
Όπως ήδη αναφέρθηκε παραπάνω, είναι ένας μετρητής IC δεκαετίας, δηλαδή μπορεί να μετρήσει έως και 10 παλμούς ρολογιού. Αυτό που κάνει αυτό το IC ξεχωριστό είναι ότι έχει τον δικό του ενσωματωμένο αποκωδικοποιητή. Λόγω του οποίου δεν χρειάζεται να προσθέσετε ένα επιπλέον IC για την αποκωδικοποίηση δυαδικών αριθμών.
Το 4017 μετρά έως και 10 παλμούς ρολογιού από 555 ώρες και δίνει υψηλή έξοδο που αντιστοιχεί σε κάθε παλμό ρολογιού ένα προς ένα από τις 10 ακίδες εξόδου του. Κάθε φορά μόνο ένα πείρο είναι υψηλό.
ΣΚΟΠΟΣ ΤΩΝ ΜΕΤΑΦΡΑΣΤΩΝ:
Υπάρχουν δύο σκοποί τρανζίστορ εδώ:
1. Τα τρανζίστορ λειτουργούν σαν διακόπτες εδώ, ενεργοποιώντας έτσι ένα πηνίο κάθε φορά.
2. Τα τρανζίστορ επιτρέπουν τη διέλευση υψηλού ρεύματος μέσω αυτών και μετά τον κινητήρα, αποκλείοντας έτσι το χρονόμετρο 555 εντελώς, καθώς μπορεί να παρέχει πολύ μικρή ποσότητα ρεύματος.
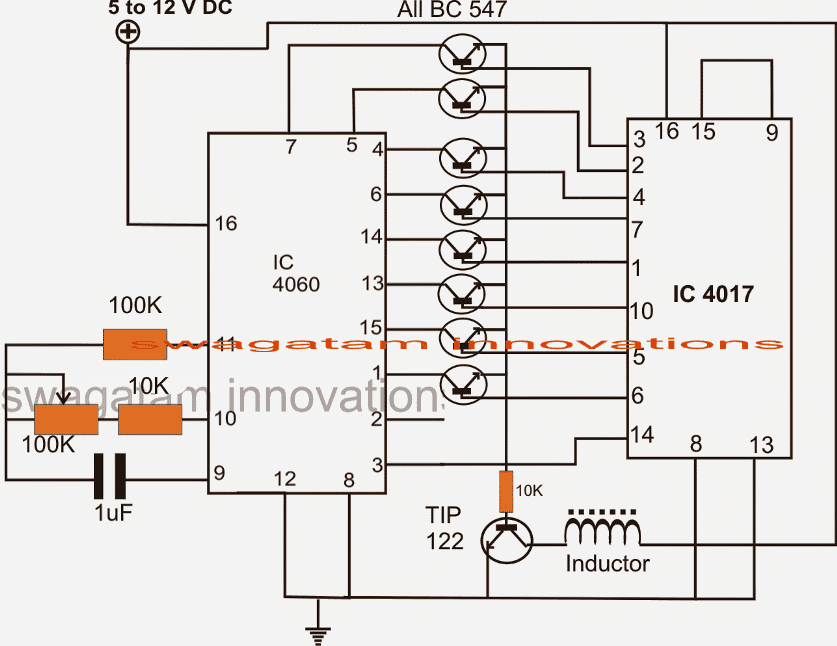
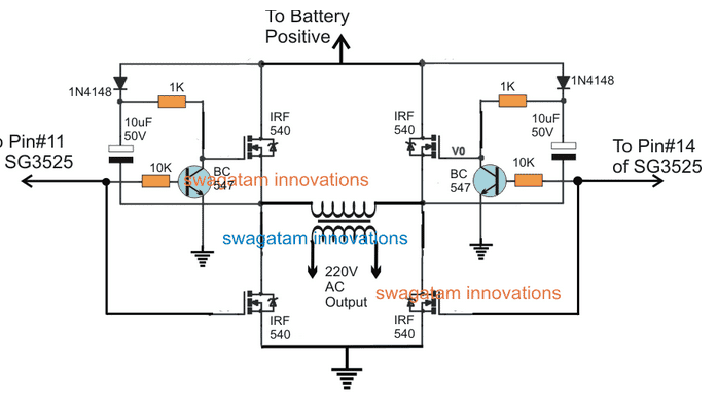
ΔΙΑΓΡΑΜΜΑ ΚΥΚΛΩΜΑΤΟΣ:

Πραγματοποιήστε συνδέσεις όπως φαίνεται στο σχήμα.
1. Συνδέστε τον ακροδέκτη 3 ή τον ακροδέκτη εξόδου 555 χρονοδιακόπτη στον ακροδέκτη 14 (ακροδέκτης ρολογιού) του IC 4017.
2. Συνδέστε τον πείρο ενεργοποίησης ή τον 13ο πείρο 4017 στη γείωση.
3. Συνδέστε τους πείρους 3,2,4,7 ένα προς ένα στα τρανζίστορ 1,2,3,4 αντίστοιχα.
4. Συνδέστε τον 10ο και τον 15ο πείρο στη γείωση μέσω μιας αντίστασης 1k.
5. Συνδέστε το κοινό καλώδιο του βηματικού κινητήρα στο θετικό της παροχής.
6. Συνδέστε άλλα καλώδια βηματικού κινητήρα με τέτοιο τρόπο ώστε τα πηνία να ενεργοποιούνται ένα προς ένα για να ολοκληρώσετε μια πλήρη περιστροφή σωστά. (Μπορείτε να δείτε το φύλλο δεδομένων του κινητήρα που παρέχεται από τον κατασκευαστή)
ΓΙΑΤΙ ΤΟ PIN 10 ΠΑΡΑΓΩΓΗΣ ΤΟΥ IC 4017 ΣΥΝΔΕΕΤΑΙ ΜΕ ΤΟ PIN 15 (ΡΕΤ ΡΕΤ)
Όπως ήδη αναφέρθηκε παραπάνω, το 4017 μετράει παλμούς ρολογιού ένα προς ένα έως το 10ο παλμό ρολογιού και δίνει υψηλή έξοδο στις ακίδες εξόδου ανάλογα, κάθε πείρος εξόδου πηγαίνει ψηλά.
Αυτό προκαλεί κάποια καθυστέρηση στην περιστροφή του κινητήρα που είναι περιττή. Καθώς απαιτούμε μόνο τέσσερις πρώτες ακίδες για μία πλήρη περιστροφή κινητήρα ή τέσσερις πρώτες δεκαδικές μετρήσεις από o έως 3, pin no. Το 10 είναι συνδεδεμένο στο pin15 έτσι ώστε μετά την 4η μέτρηση το IC επαναφέρει και η μέτρηση ξεκινά ξανά από την αρχή. Αυτό διασφαλίζει ότι δεν θα διακόπτεται η περιστροφή του κινητήρα.
ΕΡΓΑΖΟΜΕΝΟΣ:
Αφού κάνετε σωστά τις συνδέσεις εάν ενεργοποιήσετε το κύκλωμα ο κινητήρας θα αρχίσει να περιστρέφεται σε βήματα. Ο χρονοδιακόπτης 555 παράγει παλμούς ρολογιού ανάλογα με τις τιμές της αντίστασης, του ποτενσιόμετρου και του πυκνωτή.
Εάν αλλάξετε την τιμή οποιασδήποτε από αυτές τις τρεις συνιστώσες, η συχνότητα του παλμού ρολογιού θα αλλάξει.
Αυτοί οι παλμοί ρολογιού δίδονται στο IC CD 4017, το οποίο στη συνέχεια μετρά τους παλμούς ρολογιού ένα προς ένα και δίνουν 1 ως έξοδο στην καρφίτσα Νο 3,2,4,7 αντίστοιχα και επαναλαμβάνει αυτή τη διαδικασία συνεχώς.
Δεδομένου ότι το τρανζίστορ Q1 συνδέεται με τον ακροδέκτη 3, ενεργοποιείται πρώτα και μετά το τρανζίστορ Q2 ακολουθούμενο από Q3 και Q4. Αλλά όταν ένα τρανζίστορ είναι σε όλα τα υπόλοιπα παραμένουν απενεργοποιημένα.
Όταν το Q1 είναι ενεργοποιημένο, λειτουργεί σαν κλειστός διακόπτης και το ρεύμα ρέει μέσω κοινού καλωδίου στο καλώδιο 1 και στη συνέχεια στη γείωση μέσω τρανζίστορ Q1.
Αυτό ενεργοποιεί το πηνίο 1 και ο κινητήρας περιστρέφεται σε κάποια γωνία που εξαρτάται από τη συχνότητα του ρολογιού. Τότε το ίδιο συμβαίνει με το Q2 που ενεργοποιεί το πηνίο 2 ακολουθούμενο από το πηνίο 3 και το πηνίο 4. Έτσι επιτυγχάνεται μια πλήρης περιστροφή.
Όταν το ποτενσιόμετρο περιστρέφεται:
Ας υποθέσουμε ότι η αρχική θέση του δοχείου είναι τέτοια ώστε να υπάρχει μέγιστη αντίσταση (220k) μεταξύ της εκφόρτισης και του πείρου κατωφλίου. Ο τύπος για τη συχνότητα του παλμού ρολογιού εξόδου είναι:
F = 1,44 / (R1 + 2R2) C1
Είναι σαφές από τον τύπο ότι η συχνότητα των παλμών ρολογιού μειώνεται καθώς αυξάνεται η τιμή του R2. Έτσι, όταν η τιμή R2 ή pot είναι μέγιστη, η συχνότητα είναι ελάχιστη λόγω του οποίου το IC 4017 μετρά πιο αργά και δίνει πιο καθυστερημένη έξοδο.
Καθώς μειώνεται η τιμή της αντίστασης R2, αυξάνεται η συχνότητα η οποία προκαλεί την ελάχιστη καθυστέρηση μεταξύ των εξόδων του IC 4017. Και ως εκ τούτου ο βηματικός κινητήρας περιστρέφεται πιο γρήγορα.
Έτσι, η τιμή του ποτενσιόμετρου καθορίζει την ταχύτητα του κινητήρα stepper.
ΒΙΝΤΕΟ προσομοίωσης:
Εδώ μπορείτε να δείτε καθαρά πώς η ταχύτητα του κινητήρα ποικίλλει ανάλογα με την αντίσταση R2. Η τιμή του μειώνεται πρώτα και μετά αυξάνεται, η οποία με τη σειρά της αυξάνεται πρώτα και μετά μειώνει την ταχύτητα του κινητήρα stepper.
Προηγούμενο: Πώς λειτουργούν οι φακοί Crank Επόμενο: Arduino Tachometer Circuit for Precise Readings