ΕΝΑ βοηθητικό μοτέρ λειτουργεί σαν περιστροφικός ενεργοποιητής που χρησιμοποιείται κυρίως για τη μετατροπή της ηλεκτρικής εισόδου σε μηχανική επιτάχυνση. Αυτός ο κινητήρας λειτουργεί με βάση σερβομηχανισμό όπου η ανάδραση θέσης χρησιμοποιείται για τον έλεγχο της ταχύτητας και της τελικής θέσης του κινητήρα. Οι σερβοκινητήρες περιστρέφονται και αποκτούν μια συγκεκριμένη γωνία με βάση την εφαρμοζόμενη είσοδο. Οι σερβοκινητήρες είναι μικροί σε μέγεθος αλλά είναι πολύ ενεργειακά αποδοτικοί. Αυτοί οι κινητήρες ταξινομούνται σε δύο τύπους, όπως σερβοκινητήρα εναλλασσόμενου ρεύματος και σερβοκινητήρα συνεχούς ρεύματος, αλλά η κύρια διαφορά μεταξύ αυτών των δύο κινητήρων είναι η πηγή ισχύος που χρησιμοποιείται. Η απόδοση του α Σερβοκινητήρας συνεχούς ρεύματος εξαρτάται κυρίως από την τάση μόνο, ενώ ένας σερβοκινητήρας AC εξαρτάται τόσο από την τάση όσο και από τη συχνότητα. Αυτό το άρθρο εξετάζει έναν από τους τύπους σερβοκινητήρων – an AC σερβοκινητήρα – εργασία με εφαρμογές.
Τι είναι ο σερβοκινητήρας AC;
Ένας τύπος σερβοκινητήρα που παράγει μηχανική έξοδο χρησιμοποιώντας ηλεκτρική είσοδο AC στην ακριβή μορφή γωνιακής ταχύτητας ονομάζεται σερβοκινητήρας AC. Η ισχύς εξόδου που λαμβάνεται από αυτόν τον σερβοκινητήρα κυμαίνεται κυρίως από watt έως μερικά 100 watt. Η συχνότητα λειτουργίας του σερβοκινητήρα εναλλασσόμενου ρεύματος κυμαίνεται από 50 έως 400 Hz. Το διάγραμμα σερβοκινητήρα AC φαίνεται παρακάτω.

Τα κύρια χαρακτηριστικά των σερβοκινητήρων εναλλασσόμενου ρεύματος περιλαμβάνουν κυρίως: Πρόκειται για συσκευές λιγότερου βάρους, που παρέχουν σταθερότητα και αξιοπιστία κατά τη λειτουργία, δεν δημιουργείται θόρυβος κατά τη λειτουργία, παρέχουν γραμμικά χαρακτηριστικά ταχύτητας ροπής και μειωμένο κόστος συντήρησης όταν δεν υπάρχουν δακτύλιοι ολίσθησης και βούρτσες.
Ανατρέξτε σε αυτόν τον σύνδεσμο για να μάθετε περισσότερα Τύποι σερβοκινητήρα AC
AC Servo Motor Construction
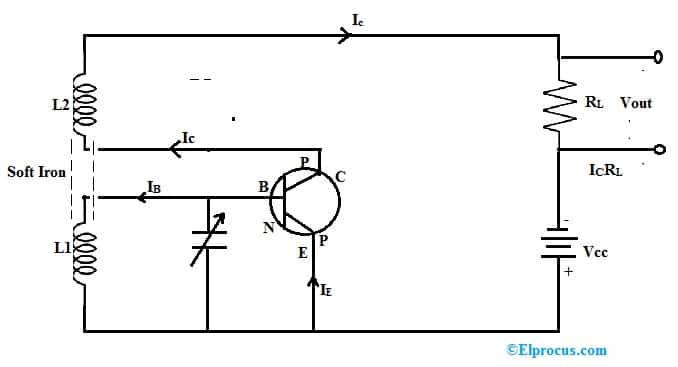
Γενικά, ένας σερβοκινητήρας AC είναι ένας επαγωγικός κινητήρας δύο φάσεων. Αυτός ο κινητήρας κατασκευάζεται με χρήση στάτορα και α στροφείο όπως ένας κανονικός κινητήρας επαγωγής. Γενικά, ο στάτορας αυτού του σερβοκινητήρα έχει μια πολυστρωματική δομή. Αυτός ο στάτορας περιλαμβάνει δύο περιελίξεις που τοποθετούνται σε απόσταση 90 μοιρών στο χώρο. Λόγω αυτής της διακύμανσης φάσης, δημιουργείται ένα περιστροφικό μαγνητικό πεδίο.

Η πρώτη περιέλιξη είναι γνωστή ως η κύρια περιέλιξη ή επίσης γνωστή ως περιέλιξη σταθερής φάσης ή αναφοράς. Εδώ, η κύρια περιέλιξη ενεργοποιείται από την πηγή τροφοδοσίας σταθερής τάσης, ενώ η άλλη περιέλιξη, όπως η περιέλιξη ελέγχου ή η φάση ελέγχου, ενεργοποιείται από τη μεταβλητή τάση ελέγχου. Αυτή η τάση ελέγχου παρέχεται απλώς από έναν σερβοενισχυτή.

Γενικά, ο ρότορας διατίθεται σε δύο τύπους τύπου κλωβού σκίουρου και τύπου κύπελλου έλξης. Ο ρότορας που χρησιμοποιείται σε αυτόν τον κινητήρα είναι ένας κανονικός ρότορας τύπου κλωβού που περιλαμβάνει ράβδους αλουμινίου στερεωμένες σε σχισμές και βραχυκυκλωμένους μέσω των ακραίων δακτυλίων. Το διάκενο αέρα διατηρείται στο ελάχιστο για μέγιστη σύνδεση ροής. Ο άλλος τύπος ρότορα όπως ένα κύπελλο έλξης χρησιμοποιείται κυρίως εκεί όπου η αδράνεια του περιστρεφόμενου συστήματος είναι χαμηλή. Έτσι αυτό βοηθά στη μείωση της κατανάλωσης ενέργειας.
Αρχή λειτουργίας του σερβοκινητήρα AC
Η αρχή λειτουργίας του σερβοκινητήρα εναλλασσόμενου ρεύματος είναι: Πρώτον, δίνεται μια σταθερή τάση εναλλασσόμενου ρεύματος στην κύρια περιέλιξη του εκκινητή του σερβοκινητήρα και ένας άλλος ακροδέκτης στάτη συνδέεται απλώς με τον μετασχηματιστή ελέγχου σε όλη την περιέλιξη ελέγχου. Λόγω της εφαρμοζόμενης τάσης αναφοράς, ο άξονας της σύγχρονης γεννήτριας θα περιστραφεί με συγκεκριμένη ταχύτητα και θα αποκτήσει μια συγκεκριμένη γωνιακή θέση.

Επιπλέον, ο άξονας του μετασχηματιστή ελέγχου έχει μια συγκεκριμένη γωνιακή θέση που συγκρίνεται με το γωνιακό σημείο του άξονα της συγχρονισμένης γεννήτριας. Έτσι, η σύγκριση δύο γωνιακών θέσεων θα δώσει το σήμα σφάλματος. Πιο συγκεκριμένα, αξιολογούνται τα επίπεδα τάσης για τις ισοδύναμες θέσεις του άξονα που παράγει το σήμα σφάλματος. Έτσι, αυτό το σήμα σφάλματος επικοινωνεί με το τρέχον επίπεδο τάσης στον μετασχηματιστή ελέγχου. Μετά από αυτό, αυτό το σήμα δίνεται στον σερβοενισχυτή έτσι ώστε να παράγει ανομοιόμορφη τάση ελέγχου.
Με αυτήν την εφαρμοζόμενη τάση, ο ρότορας επιτυγχάνει και πάλι μια συγκεκριμένη ταχύτητα, ξεκινάει την περιστροφή και διατηρείται έως ότου η τιμή του σήματος σφάλματος φτάσει στο μηδέν, επιτυγχάνοντας έτσι την προτιμώμενη θέση του κινητήρα εντός των σερβοκινητήρων AC.
Λειτουργία μεταφοράς σερβοκινητήρα AC
Η συνάρτηση μεταφοράς του σερβοκινητήρα εναλλασσόμενου ρεύματος μπορεί να οριστεί ως ο λόγος του L.T (Laplace Transform) της μεταβλητής εξόδου προς το L.T (Laplace Transform) της μεταβλητής εισόδου. Είναι λοιπόν το μαθηματικό μοντέλο που εκφράζει τη διαφορική εξίσωση που λέει το o/p στο i/p του συστήματος.
Εάν το T.F. (συνάρτηση μεταφοράς) οποιουδήποτε συστήματος είναι γνωστή, τότε η απόκριση εξόδου μπορεί να υπολογιστεί για διαφορετικούς τύπους εισόδων ώστε να αναγνωριστεί η φύση του συστήματος. Ομοίως, εάν η συνάρτηση μεταφοράς (T.F) δεν είναι γνωστή, τότε μπορεί να βρεθεί πειραματικά με απλή εφαρμογή γνωστών εισόδων στη συσκευή και μελέτη της εξόδου του συστήματος.
Ο σερβοκινητήρας εναλλασσόμενου ρεύματος είναι ένας διφασικός επαγωγικός κινητήρας που σημαίνει ότι έχει δύο περιελίξεις όπως περιέλιξη ελέγχου (τύλιγμα κύριου πεδίου) και περιέλιξη αναφοράς (συναρπαστική περιέλιξη).

Πρέπει λοιπόν να μάθουμε τη συνάρτηση μεταφοράς του σερβοκινητήρα εναλλασσόμενου ρεύματος, δηλαδή θ(s)/ec(s). Εδώ το ‘θ(s)/’ είναι η έξοδος του συστήματος ενώ το ex(s) είναι η είσοδος του συστήματος.
Για να μάθουμε τη λειτουργία μεταφοράς του κινητήρα, πρέπει να μάθουμε τη ροπή που αναπτύσσεται από τον κινητήρα «Tm» και τη ροπή που αναπτύσσεται από το φορτίο «Tl». Αν εξισώσουμε τη συνθήκη ισορροπίας όπως
Tm = Tl, τότε μπορούμε να πάρουμε τη συνάρτηση μεταφοράς.
Έστω, Tm = ροπή που αναπτύσσεται από τον κινητήρα.
Tl = ροπή που αναπτύσσεται από το φορτίο ή τη ροπή φορτίου.
‘θ’ = γωνιακή μετατόπιση.
‘ω’ = d θ/dt = angular velocity.
‘J’ = ροπή αδράνειας του φορτίου.
Το «B» είναι το ταμπλό του φορτίου.
Εδώ οι δύο σταθερές που πρέπει να εξεταστούν είναι οι Κ1 και Κ2.
Το «K1» είναι η κλίση των χαρακτηριστικών τάσης φάσης ελέγχου έναντι ροπής.
Το «K2» είναι η κλίση των χαρακτηριστικών ροπής ταχύτητας.
Εδώ, η ροπή που αναπτύσσεται από τον κινητήρα υποδηλώνεται απλώς με
Tm = K1ec- K2 dθ/dt —–(1)
Η ροπή φορτίου (TL) μπορεί να μοντελοποιηθεί λαμβάνοντας υπόψη την εξίσωση του ισοζυγίου ροπής.
Εφαρμοσμένη ροπή = αντίθετη ροπή λόγω J,B
Tl = TJ + TB = J d^2θ/dt^2 + B dθ/dt^2 + B —–(2)
Γνωρίζουμε ότι η συνθήκη ισορροπίας Tm = Tl.
K1ec- K2 dθ/dt = J d^2θ/dt^2 + B dθ/dt^2 + B
Εφαρμόστε την εξίσωση μετασχηματισμού Laplace στην παραπάνω εξίσωση
K1Ec(s) – K2 S θ(S) = J S^2θ (S) + B S θ(S)
K1Ec(s) = JS^2θ (S) + BSθ(S)+ K2S θ(S)
K1Ec(s) = θ (S)[J S^2 + BS + K2S]
T.F = θ (S)Ec(s) = K1/ J S^2 + BS + K2S
= K1/ S [B + JS + K2]
= K1/ S [B + K2 + JS]
= K1/ S (B + K2) [1 + (J/ B + K2) *S]
T.F = θ (S)Ec(s) = K1/(B + K2) / S[1 + (J/ B + K2) *S]
T.F = Km / S[1 + (J/ B + K2) *S] => Km / S(1 + STm)] = θ (S)Ec(s)
T.F = Km / S(1 + STm)] = θ (S)Ec(s)
Όπου, Km = K1/ B + K2 = σταθερά κέρδους κινητήρα.
Tm = J/ B + K2 = σταθερά χρόνου κινητήρα.
Μέθοδοι ελέγχου ταχύτητας σερβοκινητήρα AC
Γενικά, σερβο κινητήρες έχουν τρεις μεθόδους ελέγχου, όπως έλεγχο θέσης, έλεγχο ροπής και έλεγχο ταχύτητας.
Η μέθοδος ελέγχου θέσης χρησιμοποιείται για τον προσδιορισμό του μεγέθους της ταχύτητας περιστροφής σε όλα τα εξωτερικά σήματα συχνότητας εισόδου. Η γωνία περιστροφής καθορίζεται από το αρ. των παλμών. Η θέση και η ταχύτητα ενός σερβοκινητήρα μπορούν να αντιστοιχιστούν απευθείας μέσω επικοινωνίας. Καθώς η θέση της μεθόδου μπορεί να έχει εξαιρετικά αυστηρό έλεγχο της θέσης και της ταχύτητας, τότε χρησιμοποιείται συνήθως στην εφαρμογή εντοπισμού θέσης.
Στη μέθοδο ελέγχου ροπής, η ροπή εξόδου του σερβοκινητήρα ρυθμίζεται με αναλογική είσοδο στη διεύθυνση. Μπορεί να αλλάξει τη ροπή αλλάζοντας απλά την αναλογική σε πραγματικό χρόνο. Επιπλέον, μπορεί επίσης να αλλάξει την τιμή στη σχετική διεύθυνση μέσω επικοινωνίας.
Στη λειτουργία ελέγχου ταχύτητας, η ταχύτητα του κινητήρα μπορεί να ελεγχθεί με αναλογική είσοδο & παλμό. Εάν υπάρχουν απαιτήσεις ακρίβειας και δεν ανησυχείτε για τόση ροπή, τότε η λειτουργία ταχύτητας είναι καλύτερη.
Χαρακτηριστικά του σερβοκινητήρα AC
Τα χαρακτηριστικά ταχύτητας ροπής ενός σερβοκινητήρα εναλλασσόμενου ρεύματος φαίνονται παρακάτω. Στα ακόλουθα χαρακτηριστικά, η ροπή αλλάζει με την ταχύτητα αλλά όχι γραμμικά γιατί εξαρτάται κυρίως από τον λόγο της αντίδρασης (Χ) προς αντίσταση (R). Η χαμηλή τιμή αυτού του λόγου συνεπάγεται ότι ο κινητήρας έχει υψηλή αντίσταση & χαμηλή αντίδραση, σε τέτοιες περιπτώσεις, τα χαρακτηριστικά του κινητήρα είναι πιο γραμμικά από την υψηλή τιμή του λόγου για την αντίδραση (X) προς την αντίσταση (R).

Πλεονεκτήματα
Τα πλεονεκτήματα των σερβοκινητήρων AC περιλαμβάνουν τα ακόλουθα.
- Τα χαρακτηριστικά ελέγχου ταχύτητας αυτού του κινητήρα είναι καλά.
- Παράγουν μικρότερη ποσότητα θερμότητας.
- Προσφέρουν υψηλή απόδοση, περισσότερη ροπή ανά βάρος, αξιοπιστία & μειωμένο θόρυβο RF.
- Χρειάζονται λιγότερη συντήρηση.
- Έχουν μεγαλύτερο προσδόκιμο ζωής στην ανυπαρξία commutator.
- Αυτοί οι κινητήρες είναι ικανοί να χειρίζονται υψηλότερες υπερτάσεις ρεύματος σε βιομηχανικά μηχανήματα.
- Στις υψηλές ταχύτητες προσφέρουν πιο σταθερή ροπή.
- Αυτά είναι πολύ αξιόπιστα.
- Παρέχουν απόδοση υψηλής ταχύτητας.
- Αυτά είναι κατάλληλα για εφαρμογές ασταθούς φόρτωσης.
Τα μειονεκτήματα των σερβοκινητήρων AC περιλαμβάνουν τα ακόλουθα.
- Ο έλεγχος του σερβοκινητήρα AC είναι πιο δύσκολος.
- Αυτοί οι κινητήρες μπορούν να σπάσουν από συνεχή υπερφόρτωση.
- Τα κιβώτια ταχυτήτων είναι συχνά απαραίτητα για τη μετάδοση ισχύος σε υψηλές ταχύτητες.
Εφαρμογές
Οι εφαρμογές των σερβοκινητήρων AC περιλαμβάνουν τα ακόλουθα.
- Οι σερβοκινητήρες AC ισχύουν όπου η ρύθμιση θέσης είναι σημαντική και συνήθως βρίσκεται σε συσκευές ημιαγωγών, ρομπότ, αεροσκάφη και εργαλειομηχανές.
- Αυτοί οι κινητήρες χρησιμοποιούνται στα όργανα που λειτουργούν με σερβομηχανισμό όπως σε υπολογιστές και συσκευές ελέγχου θέσης.
- Ο σερβοκινητήρας AC χρησιμοποιείται σε εργαλειομηχανές, μηχανήματα ρομποτικής και συστήματα παρακολούθησης.
- Αυτοί οι σερβοκινητήρες χρησιμοποιούνται σε μια ποικιλία βιομηχανιών λόγω της αποτελεσματικότητας και της ευελιξίας τους.
- Ο σερβοκινητήρας AC χρησιμοποιείται στα περισσότερα κοινά μηχανήματα και συσκευές όπως θερμοσίφωνες, φούρνους, αντλίες, οχήματα εκτός δρόμου, εξοπλισμό σε κήπους κ.λπ.
- Πολλές από τις συσκευές και τα εργαλεία που χρησιμοποιούνται καθημερινά στο σπίτι λειτουργούν με ηλεκτρικό ρεύμα από σερβοκινητήρες AC.
Έτσι, αυτή είναι μια επισκόπηση του ac σερβοκινητήρες – λειτουργούν με εφαρμογές. Αυτοί οι κινητήρες χρησιμοποιούνται σε πολλές εφαρμογές όπως όργανα που λειτουργούν με σερβομηχανισμό και επίσης εργαλειομηχανές, συστήματα παρακολούθησης και ρομποτική. Εδώ είναι μια ερώτηση για εσάς, τι είναι ένας επαγωγικός κινητήρας;