Το EtherCAT αναπτύχθηκε αρχικά από έναν κύριο PLC κατασκευαστής συγκεκριμένα η Beckhoff Automation που χρησιμοποιείται σε συστήματα ελέγχου σε πραγματικό χρόνο και βιομηχανικός αυτοματισμός . Η Beckhoff Automation ανέπτυξε τη δική της έκδοση Fieldbus όπως το LightBus τη δεκαετία του 1980 για την αντιμετώπιση του προβλήματος του εύρους ζώνης για άλλες διεπαφές. Η πρόσθετη εργασία σε αυτό το πρωτόκολλο κατέληξε τελικά στην εφεύρεση EtherCAT. Ο Beckhoff κυκλοφόρησε το πρωτόκολλο EtherCAT το 2003 παγκοσμίως. Μετά από αυτό, συνεισέφεραν τα δικαιώματα στην ομάδα τεχνολογίας EtherCAT (ETG) το 2004. Η ETG έχει έναν εξαιρετικά ενεργό προγραμματιστή καθώς και μια ομάδα χρηστών. Αυτό το άρθρο εξετάζει μια επισκόπηση του Βασικά στοιχεία Ethercat – εργασία με εφαρμογές.
Τι είναι το Ethercat;
Το EtherCAT ή η τεχνολογία Ethernet Control Automation είναι ένα βιομηχανικό σύστημα δικτύου που εξαρτάται από το σύστημα Ethernet που χρησιμοποιείται για την επίτευξη πολύ γρήγορων και πιο ικανών επικοινωνιών. Έτσι, το EtherCAT είναι ένα πολύ γρήγορο δίκτυο που χρησιμοποιείται για την επεξεργασία δεδομένων με αποκλειστικό υλικό και λογισμικό. Αυτό το δίκτυο χρησιμοποιεί μια διαμόρφωση master-slave, full duplex με οποιαδήποτε τοπολογία δικτύου .
Ο χρόνος που απαιτείται για την επεξεργασία 1000 σημείων I/O είναι 30 δευτερόλεπτα και επικοινωνεί με 100 άξονες σερβο σε 100 εμάς. Οι άξονες σερβομηχανισμού θα λάβουν καθορισμένες τιμές για τον έλεγχο των δεδομένων και την αναφορά της πραγματικής κατάστασης. Αυτοί οι άξονες συγχρονίζονται μέσω μιας μεθόδου κατανεμημένου ρολογιού που είναι μια απλή έκδοση IEEE 1588 και μειώνει το jitter κάτω από 1 us. Το EtherCAT παρέχει γρήγορη έξοδο επειδή τα μηνύματα υποβάλλονται σε επεξεργασία εντός του υλικού προτού μετακινηθούν στην επόμενη υποτελή.
Αρχιτεκτονική EtherCAT
Η αρχιτεκτονική δικτύου EtherCAT φαίνεται παρακάτω, η οποία χρησιμοποιεί την αρχή master/slave για τον έλεγχο της πρόσβασης στο μέσο. Σε αυτήν την αρχιτεκτονική, η κύρια μονάδα EtherCAT είναι συνήθως το σύστημα ελέγχου που χρησιμοποιεί μια τυπική θύρα Ethernet καθώς και τις αποθηκευμένες πληροφορίες διαμόρφωσης δικτύου στο αρχείο ENI (EtherCAT Network Information).

Το αρχείο πληροφοριών δικτύου EtherCAT δημιουργείται απλά με βάση τα αρχεία ESI (EtherCAT SlaveInformation) που δίνονται από τους εμπόρους για κάθε συσκευή. Εδώ, ο κύριος κόμβος μεταδίδει τα πλαίσια στους υποτελείς κόμβους που μπορούν να εισάγουν και να αφαιρέσουν δεδομένα από αυτά τα πλαίσια. Οι συσκευές Slave είναι κόμβοι όπως οι μονάδες κινητήρα EPOS3 που περιέχουν τις θύρες Ethernet για επικοινωνία μέσω μιας κύριας μονάδας EtherCAT. Εδώ, η κύρια μονάδα EtherCAT είναι μια συσκευή υπολογιστή που χρησιμοποιείται για τη διατήρηση της επικοινωνίας δεδομένων μεταξύ της κύριας μονάδας καθώς και των διαφορετικών υποτελών.
Πώς λειτουργεί το EtherCAT;
Το EtherCAT χρησιμοποιείται για να ξεπεραστούν τα τυπικά σφάλματα του Industrial Ethernet μέσω του τρόπου λειτουργίας υψηλής απόδοσης, όπου συνήθως ένα μόνο πλαίσιο είναι αρκετό για τη μετάδοση και λήψη δεδομένων ελέγχου από και προς όλους τους κόμβους. Το πρωτόκολλο EtherCAT είναι χτισμένο στο φυσικό επίπεδο ενός Ethernet, ωστόσο, το EtherCAT χρησιμοποιεί μια προσέγγιση επεξεργασίας on-the-fly για μεταφορά και δρομολόγηση μηνυμάτων, η οποία ονομάζεται επίσης επικοινωνία on-the-fly αντί για χρήση TCP/IP.
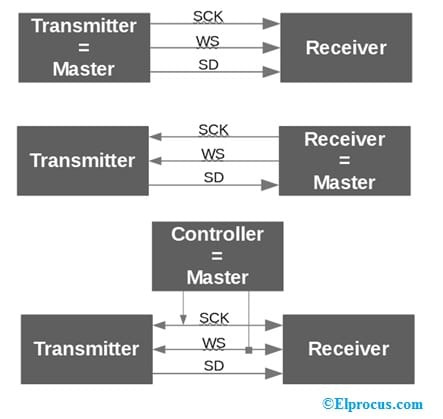
Οι διαμορφώσεις κύριας και υποτελούς EtherCAT φαίνονται παρακάτω. Σε αυτή τη διαμόρφωση, ο κύριος του Ethercat μεταδίδει ένα πακέτο δεδομένων (τηλεγράφημα) σε κάθε slave που ονομάζεται επίσης κόμβος.
Το κύριο χαρακτηριστικό του EtherCAT είναι ότι οι slaves εντός της παραπάνω διαμόρφωσης μπορούν να διαβάσουν διαφορετικά να εξάγουν απλώς τα σχετικά δεδομένα που απαιτούνται από το τηλεγράφημα και να προσθέτουν πληροφορίες στο τηλεγράφημα προτού μετακινηθεί στον δεύτερο κόμβο ή slave. Έτσι, το τηλεγράφημα μετακινείται σε όλους τους συνδεδεμένους σκλάβους και μετά επιστρέφει στον κύριο.

Το πρωτόκολλο EtherCAT στέλνει ένα τηλεγράφημα από την κύρια συσκευή σε όλους τους slaves που είναι συνδεδεμένοι στο δίκτυο. Κάθε slave εντός του δικτύου μπορεί απλώς να διαβάσει δεδομένα που ισχύουν για αυτόν τον slave και μπορεί να προσθέσει δεδομένα στο τηλεγράφημα πριν μετακινηθεί στον δεύτερο κόμβο.
Η ανάγνωση και η εγγραφή δεδομένων ενεργοποιείται απλώς μέσω ενός ειδικού ASIC σε κάθε slave του EtherCAT. Σε αυτήν την προσέγγιση, κάθε slave θα εισάγει μια ελάχιστη καθυστέρηση στη διαδικασία και οι συγκρούσεις δεν είναι εφικτές.
Το πρωτόκολλο EtherCAT παρέχει απλώς σε πραγματικό χρόνο και ντετερμινιστική, επικοινωνία που είναι συμβατή με συγχρονισμένο και έλεγχο κίνησης πολλαπλών αξόνων χωρίς την απαίτηση επιπλέον υλικού για την επίτευξη συγχρονισμού μεταξύ πολλών αξόνων.
Ανοχή σε σφάλματα
Στη διαμόρφωση master & slave του EtherCAT, εάν η έξοδος του τελευταίου κόμβου δεν συνδέεται με τον κύριο, τότε τα δεδομένα επιστρέφονται αυτόματα σε άλλη κατεύθυνση μέσω του πρωτοκόλλου EtherCAT. Έτσι, η χρονική σήμανση διατηρείται.
Κάθε κόμβος στην παραπάνω ρύθμιση παραμέτρων σφραγίζει τα δεδομένα μόλις ληφθούν, και μετά από αυτό, σφραγίζει ξανά μόλις τα μεταδώσει στον δεύτερο κόμβο. Κατά συνέπεια, κάθε φορά που ο κύριος λαμβάνει πίσω τα δεδομένα από τους διαφορετικούς κόμβους, τότε καθορίζει εύκολα την καθυστέρηση κάθε κόμβου. Η μετάδοση δεδομένων από το master λαμβάνει μια χρονική σήμανση I/O από κάθε κόμβο για να κάνει το EtherCAT πολύ πιο ντετερμινιστικό και ακριβές.

Η ανοχή σφαλμάτων σημαίνει ότι τα δίκτυα του EtherCAT δεν χρειάζεται να συνδέονται σε ένα δίκτυο δακτυλίου όπως φαίνεται στο παραπάνω διάγραμμα, ωστόσο μπορούν να συνδεθούν με διαφορετικούς τρόπους, όπως τοπολογία δέντρων, τοπολογία γραμμής, τοπολογία δακτυλίου, τοπολογία αστεριών και επίσης με συνδυασμοί.
Φυσικά, μεταξύ των slaves και του master, πρέπει να υπάρχει μια λωρίδα σύνδεσης. Μόλις τα αποσυνδέσετε, δεν μπορούν να λειτουργήσουν, αν και η τοπολογία του δικτύου είναι εξαιρετικά ευέλικτη και ανέχεται τα σφάλματα σε εξαιρετικό επίπεδο.
Στα συστήματα EtherCAT, οι διακόπτες δεν είναι απαραίτητοι όπως αυτό που βρήκαμε στο Ethernet. Τα μήκη καλωδίων μεταξύ των κόμβων έως και 100 μέτρα είναι εφικτά. Η διαφορική σηματοδότηση χαμηλής τάσης στα καλώδια συνεστραμμένου ζεύγους χαλκού λειτουργεί σε μέγιστες ταχύτητες με πολύ λιγότερη κατανάλωση ενέργειας. Έτσι, είναι επίσης εφικτό να χρησιμοποιηθούν καλώδια οπτικών ινών (FOC) για τη βελτίωση της ταχύτητας και τη συμπερίληψη γαλβανικής απομόνωσης μεταξύ των συσκευών.
Το EtherCAT χρησιμοποιεί καλώδιο Ethernet που μπορεί να έχει εμβέλεια έως και 100 μέτρα μεταξύ δύο κόμβων. Επιπλέον, το πρωτόκολλο επιτρέπει τη μετάδοση δεδομένων και την τροφοδοσία μέσω ενός καλωδίου. Αυτό το είδος σύνδεσης χρησιμοποιείται για τη σύνδεση διαφορετικών συσκευών όπως αισθητήρες με μία μόνο γραμμή. Εάν η απόσταση του κόμβου είναι πάνω από 100 μέτρα τότε χρησιμοποιείται καλώδιο οπτικών ινών όπως το 100BASE-FX. Για το EtherCAT, είναι επίσης διαθέσιμη η πλήρης σειρά καλωδίωσης Ethernet.
Πλαίσιο EtherCAT
Το πρωτόκολλο EtherCAT χρησιμοποιεί ένα τυπικό πλαίσιο Ethernet που περιλαμβάνει τουλάχιστον ένα ή παραπάνω datagrams. Σε αυτό το πλαίσιο, η κεφαλίδα του datagram θα καθορίσει τι είδους είσοδο θα ήθελε να εκτελέσει η κύρια συσκευή:
- Διαβάστε, γράψτε, διαβάστε-γράψτε.
- Δικαίωμα εισόδου σε μια συγκεκριμένη εξαρτημένη συσκευή μέσω άμεσης διευθυνσιοδότησης ή δικαίωμα εισόδου σε διάφορες υποτελείς συσκευές μέσω λογικής διευθυνσιοδότησης.
Η λογική διευθυνσιοδότηση χρησιμοποιείται για τη διαδικασία της κυκλικής ανταλλαγής δεδομένων όπου κάθε Datagram απευθύνεται σε ένα ακριβές κλάσμα της εικόνας διεργασίας εντός του τμήματος του πρωτοκόλλου EtherCAT.

Κάθε εξαρτημένη συσκευή εκχωρείται με μεμονωμένες ή περισσότερες διευθύνσεις σε αυτόν τον παγκόσμιο χώρο διευθύνσεων σε όλο το δίκτυο που έχει δημιουργηθεί. Ένα μεμονωμένο Datagram μπορεί να ληφθεί υπόψη εάν σε πολλές slave συσκευές εκχωρηθούν διευθύνσεις σε μια παρόμοια περιοχή.
Στο EtherCAT, τα Datagrams περιλαμβάνουν τις πληροφορίες που σχετίζονται με την πρόσβαση στα δεδομένα, επομένως η κύρια συσκευή αποφασίζει πότε θα έχει πρόσβαση στα δεδομένα.
Ασφάλεια πρωτοκόλλου
Επί του παρόντος, η ασφάλεια είναι ένα από τα κύρια χαρακτηριστικά ακόμη και στον τομέα του αυτοματισμού για τη μεταφορά δεδομένων καθώς και την επικοινωνία. Έτσι, το EtherCAT χρησιμοποιεί το πρωτόκολλο Safety για λόγους ασφαλείας επιτρέποντας ένα μοναδικό σύστημα επικοινωνίας τόσο για την ασφάλεια όσο και για τον έλεγχο των δεδομένων. Αυτή η δυνατότητα ασφαλείας τροποποιεί επίσης τα δεδομένα με ευελιξία και επεκτείνει την αρχιτεκτονική του συστήματος ασφαλείας κ.λπ.
Η τεχνολογία ασφαλείας του πρωτοκόλλου EtherCAT έχει πιστοποίηση TÜV και αναπτύχθηκε με βάση το IEC 61508 και είναι πανομοιότυπη με το IEC 61784-3. Αυτό το πρωτόκολλο είναι εφαρμόσιμο σε εφαρμογές ασφάλειας μέσω ενός επιπέδου ακεραιότητας ασφάλειας ίσο με το SIL 3.
Ethercat εναντίον Ethernet
Οι διαφορές μεταξύ EtherCAT και Ethernet συζητούνται παρακάτω.
|
EtherCAT |
Ethernet |
| Το EtherCAT είναι ένα σύστημα Fieldbus που βασίζεται σε Ethernet. | Το Ethernet είναι μια ενσύρματη τεχνολογία δικτύωσης υπολογιστών. |
| Εφαρμόζεται τόσο σε μαλακές όσο και σε σκληρές απαιτήσεις υπολογιστών σε πραγματικό χρόνο στην τεχνολογία αυτοματισμού. | Εφαρμόζεται σε LAN, MAN και WAN. |
| Το διεθνές πρότυπο Ethercat είναι το IEC 61158 | Το διεθνές πρότυπο Ethernet είναι το IEEE-802.3. |
| Απαιτεί λειτουργία master/slave. | Δεν απαιτεί λειτουργία master/slave. |
| Χρειάζεται Τοπολογία βασισμένη σε δακτύλιο. | Δεν χρειάζεται Τοπολογία που βασίζεται σε δακτύλιο. |
| Είναι βελτιστοποιημένο ειδικά για έλεγχο σε πραγματικό χρόνο. | Δεν είναι βελτιστοποιημένο για έλεγχο σε πραγματικό χρόνο. |
| Είναι βελτιστοποιημένο για να κρατιέται μακριά από συγκρούσεις δεδομένων. | Δεν είναι βελτιστοποιημένο για να κρατιέται μακριά από συγκρούσεις δεδομένων. |
Ethercat εναντίον Profinet
Οι διαφορές μεταξύ EtherCAT και Profinet συζητούνται παρακάτω.
|
EtherCAT |
Profinet |
| Το EtherCAT είναι ένας τύπος πρωτοκόλλου που χρησιμοποιείται για να φέρει την ευελιξία και τη δύναμη του Ethernet σε βιομηχανικούς αυτοματισμούς, συστήματα ελέγχου σε πραγματικό χρόνο, συστήματα ελέγχου κίνησης και απόκτησης δεδομένων. | Το Profinet είναι ένα πρωτόκολλο επικοινωνίας που χρησιμοποιείται για την ανταλλαγή δεδομένων μεταξύ ελεγκτών και συσκευών. |
| Το EtherCAT παρέχει μια ανοιχτή λύση με πολύ μικρότερο κόστος σε σύγκριση με το PROFINET IRT και το SERCOS III. | Το Profinet δεν παρέχει μια ανοιχτή λύση με πολύ μικρότερο κόστος. |
| Ο χρόνος απόκρισής του είναι 0,1 ms. | Ο χρόνος απόκρισής του είναι <1ms. |
| Το jitter Ethercat είναι < 0,1ms. | Το jitter Profinet είναι < 1ms. |
Ethercat εναντίον CANopen
Οι διαφορές μεταξύ EtherCAT και CANopen συζητούνται παρακάτω.
|
EtherCAT |
CANopen |
| Η ταχύτητα του διαύλου στο Ethercat είναι 100 Mbps. | Η ταχύτητα του διαύλου στο CANopen είναι 1 Mbps. |
| Η λειτουργία μεταφοράς που χρησιμοποιείται στο Ethercat είναι πλήρως αμφίδρομη. | Η λειτουργία μεταφοράς που χρησιμοποιείται στο CANopen είναι ημιαμφίδρομη. |
| Ο ντετερμινισμός ή το jitter μεταξύ των συσκευών είναι χαμηλός ως 1ns. | Ο ντετερμινισμός ή το jitter μεταξύ συσκευών είναι συνήθως 100 έως 200 ns. |
| Ένας μόνο κύριος χρησιμοποιείται με έναν ή πολλούς σκλάβους. | Το Single/multi-master χρησιμοποιείται με έναν ή πολλούς σκλάβους. |
| Η μέγιστη απόσταση μεταξύ των συσκευών είναι 100 μέτρα. | Η μέγιστη απόσταση μεταξύ των συσκευών εξαρτάται κυρίως από την ταχύτητα του διαύλου. |
| Η θύρα επικοινωνίας που χρησιμοποιείται ως δευτερεύουσα είναι μια USB. | Η θύρα επικοινωνίας που χρησιμοποιείται ως δευτερεύουσα είναι η RS232. |
Ethercat εναντίον Modbus
Οι διαφορές μεταξύ EtherCAT και Modbus συζητούνται παρακάτω.
|
EtherCAT |
Modbus |
| Το EtherCAT είναι ένα σύστημα διαύλου πεδίου που βασίζεται σε Ethernet. | Το Modbus είναι ένα πρωτόκολλο επικοινωνίας σειριακών δεδομένων |
| Χρησιμοποιεί την αρχή της επεξεργασίας on the fly. | Χρησιμοποιεί σειριακές γραμμές επικοινωνίας χαρακτήρων. |
| Το EtherCAT βασίζεται στο μοντέλο master και slave. | Το Modbus βασίζεται σε ένα μοντέλο αίτησης-απόκρισης. |
| Υποστηρίζει όλα τα τοπολογίες δικτύου σχεδόν. | Υποστηρίζει μόνο τοπολογίες γραμμής και αστεριών. |
| Το Ethercat είναι ντετερμινιστικό. | Το Modbus δεν είναι ντετερμινιστικό επειδή βασίζεται στο TCP. |
Πλεονεκτήματα και μειονεκτήματα
Τα πλεονεκτήματα του πρωτοκόλλου Ethercat περιλαμβάνουν τα ακόλουθα.
- Το EtherCAT είναι ένα εξαιρετικό Fieldbus που χρησιμοποιείται σε εφαρμογές ελέγχου κίνησης.
- Έχει επαληθευτεί για τη βελτιστοποίηση της απόδοσης της μηχανής μέσω της ευέλικτης τοπολογίας, της ντετερμινιστικής απόδοσης και του διαφορετικού συνόλου χαρακτηριστικών.
- Απλώς υποστηρίζει ολόκληρη την οικογένεια CANopen και το προφίλ οδήγησης της Sercos. Έτσι, αυτό βοηθά τους χρήστες να τακτοποιήσουν εύκολα τα δίκτυα EtherCAT στην ακριβή εφαρμογή αλλάζοντας προκαθορισμένα βασικά προφίλ.
- Ο πλεονασμός του είναι επίσης δυνατός χρησιμοποιώντας μια τοπολογία δακτυλίου. Το EtherCAT χρησιμοποιεί επίσης αστέρι, δέντρο, γραμμή και τοπολογία λεωφορείου .
- Αυτό το πρωτόκολλο παρέχει υψηλή ταχύτητα, λιγότερη κίνηση δεδομένων, μικρότερο κόστος υλικού και μεγαλύτερη ακρίβεια και μηχανισμό συγχρονισμού του ρολογιού σε σύγκριση με το Ethernet.
- Αυτή η ταχύτητα δικτύου μπορεί επίσης να διαχειρίζεται επειδή οι υπολογιστές μπορεί να έχουν πρόβλημα να χειριστούν την καλύτερη ποσότητα κύκλων, επομένως η βελτιστοποίηση στο EtherCAT είναι εφικτή.
- Υποστηρίζει σχεδόν όλες τις τοπολογίες, ώστε να μπορεί να χρησιμοποιηθεί σε ένα ευρύ φάσμα εφαρμογών με τον τυπικό διακόπτη που βασίζεται σε τοπολογία αστέρι Ethernet.
- Πρωτόκολλα Ethernet είναι πολύ ασφαλείς, χρησιμοποιούν απλοποιημένα κύρια, ο χώρος δεδομένων είναι περισσότερος και η επεξεργασία είναι εν κινήσει.
Τα μειονεκτήματα του πρωτοκόλλου Ethercat περιλαμβάνουν τα ακόλουθα.
- Το κύριο μειονέκτημα του EtherCAT είναι ότι οι εξαρτημένες συσκευές απαιτούν την εισαγωγή ενός συγκεκριμένου υλικού ASIC για την εκτέλεση του EtherCAT. Το μοντέλο δεδομένων του είναι εξαιρετικά διαφορετικό και επίσης πολύ δύσκολο να γίνει κατανοητό.
Εφαρμογές
ο εφαρμογές του EtherCAT περιλαμβάνουν τα ακόλουθα.
- Το EtherCAT μπορεί να εφαρμοστεί σε διαφορετικά πεδία λόγω πολλών χαρακτηριστικών όπως η εξαιρετική απόδοση, η απλότητα, η στιβαρότητα, η οικονομική προσιτότητα, η ενσωματωμένη ασφάλεια και η ευέλικτη τοπολογία. Χρησιμοποιείται σε διάφορους τομείς όπως εργαλειομηχανές, ρομποτική, πιεστήρια εκτύπωσης, πρέσες, σταθμοί ηλεκτροπαραγωγής, υποσταθμοί, πάγκοι δοκιμής, μηχανές συγκόλλησης, γεωργικά μηχανήματα, γερανοί και ανελκυστήρες, ανεμογεννήτριες, φρέζες, μηχανές επιλογής και τοποθέτησης, μηχανές συσκευασίας, μετρήσεις συστήματα, Εργασίες σιδήρου και χάλυβα, Μηχανές χαρτιού και χαρτοπολτού, συστήματα ελέγχου σκηνής, συστήματα ελέγχου σήραγγας κ.λπ.
- Εφαρμόζεται στη μέτρηση εξοπλισμού, ιατρικών συσκευών, ελέγχου μηχανών, κινητών μηχανών, πολυάριθμων ενσωματωμένων συστημάτων και αυτοκινήτων.
- Έχει εξαιρετικά υψηλή απόδοση, είναι απλό στην εγκατάσταση και πρωτόκολλο ανοιχτής εφαρμογής που βασίζεται σε επίπεδο που χρησιμοποιείται σε εφαρμογές Ethernet
- Αυτό είναι ένα σύστημα επικοινωνίας σε πραγματικό χρόνο και ανοιχτό, τόσο ευρέως χρησιμοποιούμενο στην κατασκευή αυτοματισμών.
Έτσι, αυτό είναι μια επισκόπηση του Ethercat – εργασία με εφαρμογές. Το EtherCAT κάνει τα συστήματα και τις μηχανές απλούστερα, πιο γρήγορα και πιο οικονομικά. Είναι ένα διεθνές πρότυπο IEC που δεν αντιπροσωπεύει αποκλειστικά τη σταθερότητα, αλλά και το άνοιγμα: μέχρι τώρα, οι προδιαγραφές EtherCAT δεν έχουν αλλάξει ποτέ, αλλά επεκτάθηκαν μόνο συμβατά. Το EtherCAT θεωρείται το «Ethernet Fieldbus» καθώς συγχωνεύει τα οφέλη Ethernet με τα τυπικά συστήματα Fieldbus απλότητα και αποφεύγει την πολυπλοκότητα των τεχνολογιών πληροφορικής. Εδώ υπάρχει μια ερώτηση για εσάς, τι είναι το Ethernet;