Η ανάρτηση εξηγεί μια μέθοδο που μπορεί πιθανώς να χρησιμοποιηθεί για την ενίσχυση της παθητικής ικανότητας αισθητήρα υπερύθρων για την ανίχνευση ακόμη και μιας στατικής ή χαρτικής ανθρώπινης παρουσίας. Αυτό το χαρακτηριστικό συνήθως δεν είναι δυνατό με τους συμβατικούς αισθητήρες PIR.
Πώς το PIR ανιχνεύει την ανθρώπινη παρουσία
Έχω ήδη συζητήσει πολλές εφαρμογές ανίχνευσης κίνησης με βάση το PIR σε αυτόν τον ιστότοπο, ωστόσο όλες αυτές οι εφαρμογές απαιτούν την ανθρώπινη παρουσία να είναι συνεχώς σε κίνηση για να διατηρήσει το PIR ανιχνεύοντας την παρουσία τους, αυτό φαίνεται να είναι ένα μεγάλο μειονέκτημα που εμποδίζει αυτές τις μονάδες να ανιχνεύσουν μια σταθερή ή σταθερή ανθρώπινη κατοχή.
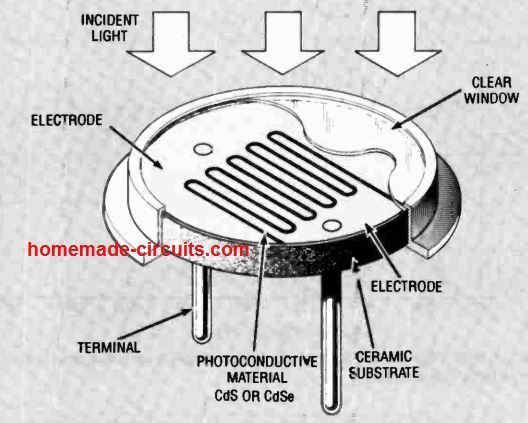
Ωστόσο, το προαναφερθέν μειονέκτημα έχει έναν λόγο πίσω από αυτό. Οι συμβατικοί αισθητήρες PIR λειτουργούν ανιχνεύοντας τα σήματα υπερύθρων από ένα ανθρώπινο σώμα μέσω μερικών παράλληλων εγκοπών στον μπροστινό τους φακό και το εσωτερικό κύκλωμα ενεργοποιείται μόνο όταν τα σήματα υπερύθρων διασχίζουν αυτές τις υποδοχές ανίχνευσης («οράματα»).
Η διέλευση των σημάτων υπερύθρων κατά μήκος των αυλακώσεων ανίχνευσης επιτρέπει στο κύκλωμα PIR να μεταφράσει τις πληροφορίες σε δύο αντίστοιχους εναλλασσόμενους παλμούς, οι οποίοι με τη σειρά τους διορθώνονται για να παράγουν την τάση ενεργοποίησης στον ακροδέκτη του PIR.
Δεν είναι δυνατή η ανίχνευση του στόχου χαρτικών
Αυτό σημαίνει ότι εάν η πηγή υπερύθρων είναι ακίνητη, δεν θα ζητήσει από τη μονάδα PIR να παράγει σκανδάλη στον ακροδέκτη εξόδου της. Αυτό συνεπάγεται επίσης ότι το σήμα υπερύθρων από την πηγή θα πρέπει κατά κάποιο τρόπο να συνεχίζει να διασχίζει τις δεδομένες υποδοχές ανίχνευσης PIR προκειμένου να του επιτρέψει να αισθανθεί έναν δεδομένο άνθρωπο εντός της ζώνης.
Φαίνεται ότι δεν υπάρχει άμεση ή απλή λύση για αυτό, επειδή οι μονάδες PIR δεν μπορούν να τροποποιηθούν εσωτερικά για αυτό, γεγονός που καθιστά την μονάδα ικανή να ανιχνεύσει σταθερή ανθρώπινη παρουσία.
Ωστόσο, μια λογική τήρηση μας λέει ότι εάν είναι μια διαφορετική πηγή IR που μπορεί να απαιτείται για να διατηρηθεί η μονάδα PIR ενεργοποιημένη, τότε γιατί να μην αναγκάσει το ίδιο το PIR να βρίσκεται σε συνεχή κίνηση αντί για το θέμα.
Η ιδέα μπορεί να απεικονιστεί από την ακόλουθη προσομοίωση GIF, η οποία δείχνει μια ταλαντωτική μονάδα PIR και έναν στατικό άνθρωπο στη ζώνη ανίχνευσης.

Εδώ μπορούμε να δούμε πώς ένα ταλαντωμένο PIR προσαρμόζεται στο ζήτημα και μεταμορφώνεται επιτρέποντας την ανίχνευση ακόμη και στατικών θεμάτων IR.
Αυτό γίνεται εφικτό επειδή μέσω της κίνησής του η μονάδα PIR μετατρέπει την σταθερή πηγή IR σε μια συνεχώς μεταβαλλόμενη απεικόνιση IR στις δύο υποδοχές λήψης της.
Αν και η ιδέα φαίνεται περίπλοκη, μπορεί πραγματικά να λυθεί χρησιμοποιώντας ένα κύκλωμα κινητήρα ελεγχόμενης αργής ταλάντωσης PwM.
Θα μάθουμε ολόκληρο τον μηχανισμό και τις λεπτομέρειες του κυκλώματος στις ακόλουθες ενότητες.
Όπως ήδη συζητήσαμε, οι συμβατικές μονάδες PIR είναι σε θέση να ανιχνεύουν μόνο κινούμενα αντικείμενα και δεν μπορούν να προσδιορίσουν ένα σταθερό στόχο που καθιστά την εφαρμογή του περιορισμένη ως ανιχνευτής ανθρώπινης κίνησης μόνο.
Για εφαρμογές όπου η ανίχνευση της ανθρώπινης πληρότητας χωρίς κινητήρα είναι απαραίτητη σε τέτοια σενάρια ένα συμβατικό PIR μπορεί να καταστεί άχρηστο και μπορεί να απαιτεί κάποια εξωτερική ρύθμιση για την αναβάθμισή του.
Σχεδιασμός PIR για ανίχνευση κινητών στόχων
Στην παραπάνω ενότητα μάθαμε ότι αντί να χρειάζεται ο στόχος να κινείται, η μονάδα PIR μπορεί να μετακινηθεί από πάνω σε μια δεδομένη ακτίνα για την εφαρμογή της επιθυμητής ανίχνευσης στατικού στόχου.
Στις παρακάτω ενότητες μαθαίνουμε σχετικά με έναν απλό μηχανισμό κυκλώματος που μπορεί να χρησιμοποιηθεί με PIR τοποθετημένο πάνω από ένα μικρό κινητήρα DC για τις προτεινόμενες ταλαντώσεις.
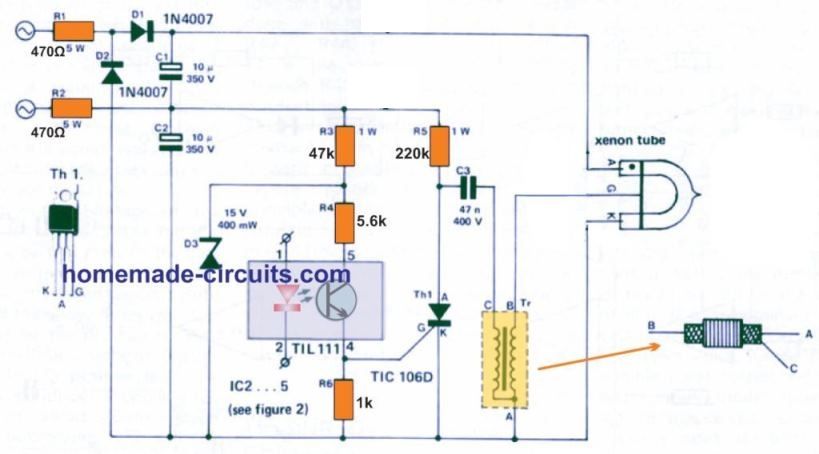
Ο οδηγός κινητήρα PWM / Flip Flop ελεγχόμενος
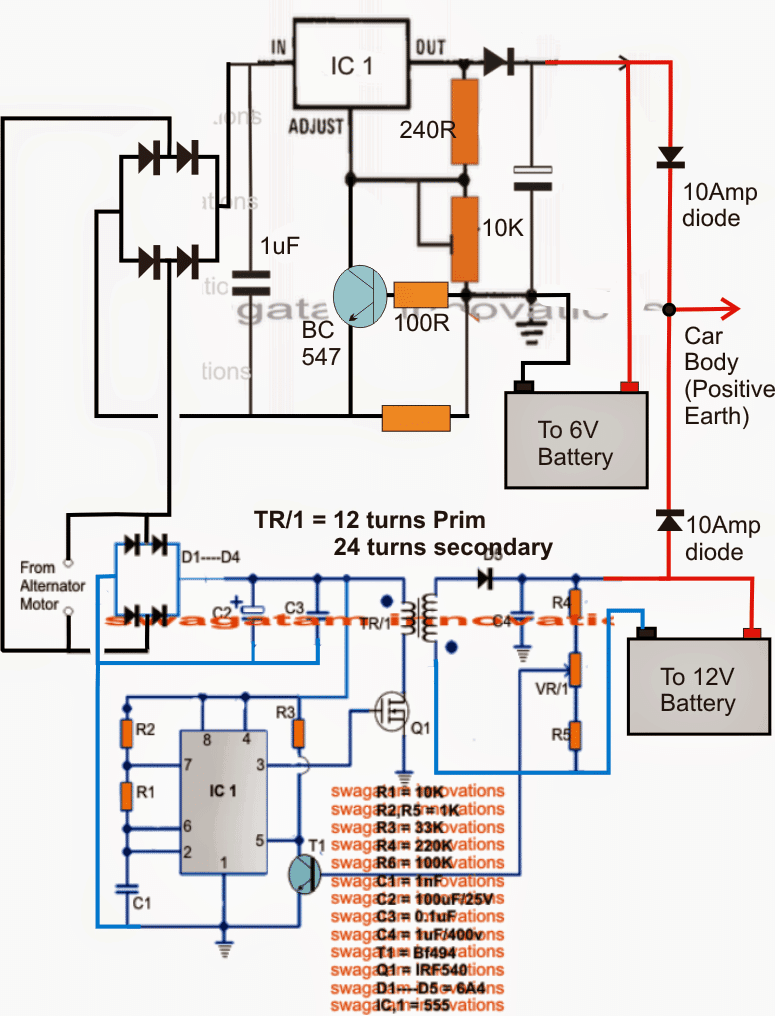
Το σύστημα απαιτεί βασικά έναν προσδιορισμό ταχύτητας ελεγχόμενης PWM και μια εναλλαγή flip flop για τον κινητήρα. Το παρακάτω διάγραμμα δείχνει πώς αυτά τα χαρακτηριστικά μπορούν να αποδοθούν στον κινητήρα PIR με τη βοήθεια ενός απλού κυκλώματος:

Το εμφανιζόμενο κύκλωμα χρησιμοποιεί ένα μοναδικό IC HEF40106 hex αντιστρεπτική πύλη IC schmitt που περιλαμβάνει 6 πύλες ΟΝ μετατροπέα.
Οι πύλες N1 και N2 είναι διαμορφωμένες ώστε να παράγουν μια ρυθμιζόμενη έξοδο PWM η οποία τροφοδοτείται στις πύλες N4, N5, N6 σχηματίζοντας τα buffer.
Η κοινή έξοδος από αυτές τις ενδιάμεσες πύλες τερματίζεται στην πύλη ενός mosfet οδηγού.
Το περιεχόμενο PWM ρυθμίζεται με τη βοήθεια του P1, το οποίο τελικά εφαρμόζεται στον συνδεδεμένο κινητήρα μέσω ενός συνόλου επαφών ρελέ DPDT.
Αυτές οι επαφές ρελέ καθορίζουν την κατεύθυνση της κίνησης του κινητήρα (δεξιόστροφα ή αριστερόστροφα).
Αυτές οι επαφές ρελέ DPDT flip flop ελέγχονται από έναν αμετάβλητο χρονοδιακόπτη διαμορφωμένο γύρω από την πύλη Ν3, όπου ο πυκνωτής C3 / R3 καθορίζει σε ποιο ρυθμό πρέπει να αλλάξει το ρελέ προκειμένου να επιτρέψει στον κινητήρα να αλλάζει συνεχώς την κατεύθυνση περιστροφής του.
Η παραπάνω σχεδίαση επιτρέπει στον κινητήρα να εκτελεί την απαιτούμενη αργή και πέρα από την ταλάντωση κίνηση σε μια δεδομένη ακτινική ζώνη.
Το C3 μπορεί να επιλεγεί για να ξεκινήσει η μετάβαση μετά από κάθε 5 έως 6 δευτερόλεπτα και το PWm μπορεί να ρυθμιστεί για να επιτρέψει μια εξαιρετικά αργή κίνηση του κινητήρα, επειδή χρειάζεται απλώς να διασφαλίσει ότι οι υποδοχές του PIR διασχίζουν τα σήματα IR του στόχου στο εγκαίρως.
Ωστόσο, δεδομένου ότι η λειτουργία του κινητήρα είναι αργή, η έξοδος από το PIR θα πρέπει να διατηρηθεί μέσω ενός χρονοδιακόπτη καθυστέρησης OFF έτσι ώστε το συνδεδεμένο φορτίο να μην απενεργοποιείται και να ενεργοποιείται ενώ η κίνηση του κινητήρα κόβει εναλλακτικά τις γραμμές IR από την ανθρώπινη κατοχή.
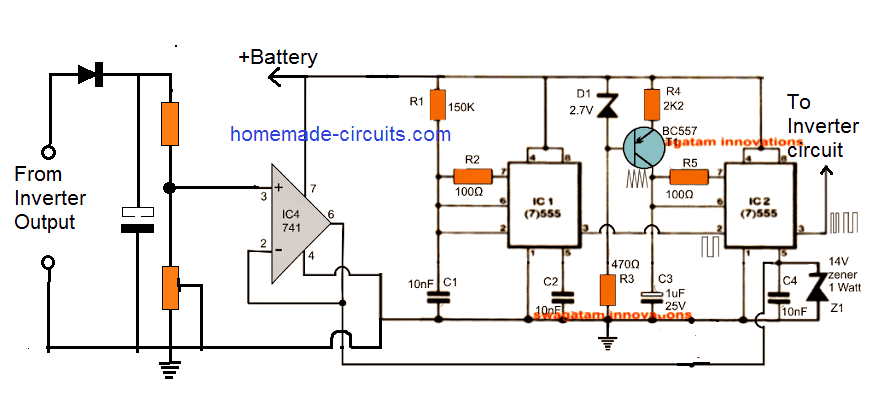
Το χρονόμετρο καθυστέρησης
Το ακόλουθο καθυστέρηση χρονοδιακόπτη κύκλωμα μπορεί να χρησιμοποιηθεί που διασφαλίζει ότι κάθε φορά που η έξοδος PIR παράγει τον αισθητήρα παλμού, η καθυστέρηση από το χρονόμετρο παρατείνεται για 5 έως 10 δευτερόλεπτα και το συνδεδεμένο φορτίο δεν διακόπτεται ποτέ κατά τη διάρκεια της διαδικασίας.

Στην παραπάνω ρύθμιση μπορούμε να δούμε τον κινητήρα που λαμβάνει την τροφοδοσία ηλεκτρικής κίνησης από το στάδιο PWM / flip flop όπως συζητήθηκε στην προηγούμενη παράγραφο.
Ο άξονας του κινητήρα μπορεί να φανεί σε συνδυασμό με έναν οριζόντιο άξονα πάνω από τον οποίο στερεώνεται το PIR, έτσι ώστε όταν ο κινητήρας κινείται, το PIR περνάει από μια αντίστοιχα μεταβαλλόμενη ακτινική κίνηση από και προς την κίνηση.
Ενώ η παραπάνω κίνηση PIR προκαλείται, τα σήματα IR από ένα σταθερό στόχο στη ζώνη ανιχνεύονται με τη μορφή σύντομων εναλλακτικών παλμών, οι οποίοι δημιουργούνται στον πείρο εξόδου του PIR που υποδεικνύεται με το μπλε καλώδιο.
Αυτοί οι παλμοί εφαρμόζονται σε έναν πυκνωτή 1000uF ο οποίος φορτίζει κάθε παλμό και διασφαλίζει ότι το BC547 διατηρείται σε κατάσταση αγώγιμης λειτουργίας χωρίς διακοπή κατά τη διάρκεια της διαδικασίας.
Ο οδηγός ρελέ που αποτελείται από το στάδιο BC557 ανταποκρίνεται στο παραπάνω σταθερό σήμα από τον συλλέκτη BC547 και με τη σειρά του κρατά το ρελέ ON, αρκεί το PIR να ανιχνεύει ανθρώπινη παρουσία.
Το φορτίο ρελέ παραμένει έτσι ενεργοποιημένο συνεχώς λόγω της παρουσίας ενός στάσιμου ανθρώπου στην περιοχή.
Ωστόσο, σε περίπτωση που η ανθρώπινη κατοχή αφαιρεθεί ή όταν ο στόχος απομακρυνθεί από τη ζώνη, το στάδιο χρονοδιακόπτη καθυστέρησης διατηρεί το ρελέ και το φορτίο ενεργοποιείται για τα προβλεπόμενα 5 έως 10 δευτερόλεπτα μετά το οποίο κλείνει μόνιμα, έως ότου η ζώνη καταληφθεί και πάλι από μια πιθανή πηγή που προέρχεται από IR.
Λίστα ανταλλακτικών
- R1, R4 = 10Κ
- R2 = 47 OHMS
- P1 = 100K ΔΟΧΕΙΟ
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0.1uF / 100V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = ΔΙΑΚΟΠΤΗΣ DPST Ή ΣΧΕΔΙΟ DPDT
- R3, C3 καθορίζεται από κάποια δοκιμή και σφάλμα
ΕΚΣΥΓΧΡΟΝΙΖΩ:
Το παραπάνω εξηγημένο κύκλωμα PIR για την ανίχνευση στατικής ανθρώπινης παρουσίας μπορεί να απλοποιηθεί πολύ χρησιμοποιώντας ένα κύκλωμα ελικόπτερο σήματος όπως απεικονίζεται στην ακόλουθη προσομοίωση GIF:
Μια προσεκτική επιθεώρηση δείχνει ότι στην πραγματικότητα δεν απαιτείται ταλαντωτική κίνηση, ότι ο κινητήρας και η λεπίδα θα πρέπει να επιτρέπεται να περιστρέφονται ελεύθερα διατηρώντας το ταχύτητα κινητήρα σε χαμηλότερο επίπεδο .
Αυτό θα μπορούσε επίσης να επιτύχει αποτελεσματικά την προβλεπόμενη στατική λειτουργία ανίχνευσης PIR.

Επίδειξη βίντεο που αποδεικνύει τη στατική ανίχνευση ανθρώπου για PIR
Προηγούμενο: Εξηγήθηκαν 3 κυκλώματα διακόπτη ενεργοποιημένα με ήχο Επόμενο: 4 απλά κυκλώματα σειρήνας που μπορείτε να δημιουργήσετε στο σπίτι