
Όπως υποδηλώνει το όνομα, αυτό το άρθρο θα δώσει μια ακριβή ιδέα για τη δομή και τη λειτουργία του ελεγκτή PID. Ωστόσο, ανατρέχοντας σε λεπτομέρειες, ας πάρουμε μια εισαγωγή για τους ελεγκτές PID. Οι ελεγκτές PID βρίσκονται σε ένα ευρύ φάσμα εφαρμογών για έλεγχο βιομηχανικών διεργασιών. Περίπου το 95% των λειτουργιών κλειστού βρόχου του βιομηχανικός αυτοματισμός τομέα χρησιμοποιούν ελεγκτές PID. Το PID σημαίνει Proportional-Integral-Παράγωγο. Αυτοί οι τρεις ελεγκτές συνδυάζονται με τέτοιο τρόπο ώστε να παράγει ένα σήμα ελέγχου. Ως ελεγκτής ανάδρασης, παρέχει την έξοδο ελέγχου στα επιθυμητά επίπεδα. Προτού εφευρεθούν μικροεπεξεργαστές, ο έλεγχος PID εφαρμόστηκε από τα αναλογικά ηλεκτρονικά εξαρτήματα. Αλλά σήμερα όλοι οι ελεγκτές PID επεξεργάζονται από τους μικροεπεξεργαστές. Προγραμματιζόμενοι ελεγκτές λογικής έχετε επίσης τις ενσωματωμένες οδηγίες ελεγκτή PID. Λόγω της ευελιξίας και της αξιοπιστίας των ελεγκτών PID, χρησιμοποιούνται παραδοσιακά σε εφαρμογές ελέγχου διεργασιών.
Τι είναι ο ελεγκτής PID;
Ο όρος PID σημαίνει αναλογικό ολοκληρωμένο παράγωγο και είναι ένα είδος συσκευής που χρησιμοποιείται για τον έλεγχο διαφορετικών μεταβλητών διεργασίας, όπως πίεση, ροή, θερμοκρασία και ταχύτητα σε βιομηχανικές εφαρμογές. Σε αυτόν τον ελεγκτή, μια συσκευή ανατροφοδότησης βρόχου ελέγχου χρησιμοποιείται για τη ρύθμιση όλων των μεταβλητών της διαδικασίας.
Αυτός ο τύπος ελέγχου χρησιμοποιείται για την οδήγηση ενός συστήματος προς την κατεύθυνση μιας αντικειμενικής θέσης σε διαφορετικό επίπεδο. Είναι σχεδόν παντού για έλεγχο θερμοκρασίας και χρησιμοποιείται σε επιστημονικές διαδικασίες, αυτοματισμούς και μυριάδες χημικά. Σε αυτόν τον ελεγκτή, η ανατροφοδότηση κλειστού βρόχου χρησιμοποιείται για τη διατήρηση της πραγματικής εξόδου από μια μέθοδο όπως κοντά στον αντικειμενικό αλλιώς έξοδο στο σημείο επιδιόρθωσης εάν είναι δυνατόν. Σε αυτό το άρθρο, συζητείται ο σχεδιασμός του ελεγκτή PID με τρόπους ελέγχου που χρησιμοποιούνται σε αυτά, όπως P, I & D.
Ιστορία
Η ιστορία του ελεγκτή PID είναι, Το έτος 1911, ο πρώτος ελεγκτής PID αναπτύχθηκε από τον Elmer Sperry. Μετά από αυτό, η TIC (Taylor Instrumental Company) τέθηκε σε εφαρμογή ένας πρώην πνευματικός ελεγκτής με πλήρως συντονιζόμενο το έτος 1933. Μετά από λίγα χρόνια, οι μηχανικοί ελέγχου αφαίρεσαν το σφάλμα σταθερής κατάστασης που βρίσκεται σε αναλογικούς ελεγκτές επανασυνδέοντας το τέλος σε κάποια ψευδή τιμή έως ότου το σφάλμα δεν ήταν μηδέν.
Αυτή η επανασύνδεση περιλάμβανε το σφάλμα που είναι γνωστό ως αναλογικό-Integral ελεγκτή. Μετά από αυτό, το έτος 1940, ο πρώτος πνευματικός ελεγκτής PID αναπτύχθηκε μέσω μιας παράγωγης δράσης για τη μείωση των προβλημάτων υπέρβασης.
Το 1942, οι Ziegler & Nichols εισήγαγαν κανόνες συντονισμού για να ανακαλύψουν και να ορίσουν τις κατάλληλες παραμέτρους των ελεγκτών PID από τους μηχανικούς. Επιτέλους, οι αυτόματοι ελεγκτές PID χρησιμοποιήθηκαν εκτενώς σε βιομηχανίες στα μέσα του 1950.
Διάγραμμα μπλοκ ελεγκτή PID
Ένα σύστημα κλειστού βρόχου όπως ένας ελεγκτής PID περιλαμβάνει ένα σύστημα ελέγχου ανατροφοδότησης. Αυτό το σύστημα αξιολογεί τη μεταβλητή ανάδρασης χρησιμοποιώντας ένα σταθερό σημείο για τη δημιουργία σήματος σφάλματος. Με βάση αυτό, αλλάζει την έξοδο του συστήματος. Αυτή η διαδικασία θα συνεχιστεί έως ότου το σφάλμα φτάσει στο μηδέν, διαφορετικά η τιμή της μεταβλητής ανατροφοδότησης γίνεται ισοδύναμη με ένα σταθερό σημείο.
Αυτός ο ελεγκτής παρέχει καλά αποτελέσματα σε σύγκριση με τον ελεγκτή τύπου ON / OFF. Στον ελεγκτή τύπου ON / OFF, μπορούν να επιτευχθούν μόνο δύο συνθήκες για τη διαχείριση του συστήματος. Μόλις η τιμή της διαδικασίας είναι χαμηλότερη από το σταθερό σημείο, τότε θα ανάψει. Ομοίως, θα απενεργοποιηθεί μόλις η τιμή είναι υψηλότερη από μια σταθερή τιμή. Η έξοδος δεν είναι σταθερή σε αυτό το είδος ελεγκτή και θα ταλαντεύεται συχνά στην περιοχή του σταθερού σημείου. Ωστόσο, αυτός ο ελεγκτής είναι πιο σταθερός και ακριβής σε σύγκριση με τον ελεγκτή τύπου ON / OFF.

Εργασία του ελεγκτή PID
Εργασία του PID Controller
Με τη χρήση ενός απλού ελεγκτή ON-OFF χαμηλού κόστους, είναι δυνατές μόνο δύο καταστάσεις ελέγχου, όπως πλήρως ON ή πλήρως OFF. Χρησιμοποιείται για περιορισμένη εφαρμογή ελέγχου όπου αυτές οι δύο καταστάσεις ελέγχου είναι αρκετές για τον στόχο ελέγχου. Ωστόσο, η ταλαντούμενη φύση αυτού του ελέγχου περιορίζει τη χρήση του και ως εκ τούτου αντικαθίσταται από ελεγκτές PID.
Ο ελεγκτής PID διατηρεί την έξοδο έτσι ώστε να υπάρχει μηδενικό σφάλμα μεταξύ της μεταβλητής διαδικασίας και του σημείου ρύθμισης / επιθυμητής εξόδου από λειτουργίες κλειστού βρόχου. Το PID χρησιμοποιεί τρεις βασικές συμπεριφορές ελέγχου που εξηγούνται παρακάτω.
P- Ελεγκτής
Ο αναλογικός ή ο ελεγκτής P δίνει μια έξοδο ανάλογη με το τρέχον σφάλμα e (t). Συγκρίνει το επιθυμητό ή το καθορισμένο σημείο με την πραγματική τιμή ή την τιμή της διαδικασίας ανατροφοδότησης. Το προκύπτον σφάλμα πολλαπλασιάζεται με μια αναλογική σταθερά για να πάρει την έξοδο. Εάν η τιμή σφάλματος είναι μηδέν, τότε αυτή η έξοδος ελεγκτή είναι μηδέν.

Ρ-ελεγκτής
Αυτός ο ελεγκτής απαιτεί προκατάληψη ή μη αυτόματη επαναφορά όταν χρησιμοποιείται μόνος του. Αυτό συμβαίνει επειδή δεν φτάνει ποτέ στην κατάσταση σταθερής κατάστασης. Παρέχει σταθερή λειτουργία αλλά διατηρεί πάντα το σφάλμα σταθερής κατάστασης. Η ταχύτητα της απόκρισης αυξάνεται όταν αυξάνεται η αναλογική σταθερά Kc.

Απόκριση P-Controller
I-ελεγκτής
Λόγω του περιορισμού του ελεγκτή p όπου υπάρχει πάντα μια μετατόπιση μεταξύ της μεταβλητής διαδικασίας και του σημείου ρύθμισης, απαιτείται ο ελεγκτής I, ο οποίος παρέχει την απαραίτητη ενέργεια για την εξάλειψη του σφάλματος σταθερής κατάστασης. Ενσωματώνει το σφάλμα για μια χρονική περίοδο έως ότου η τιμή σφάλματος φτάσει στο μηδέν. Διατηρεί την τιμή στην τελική συσκευή ελέγχου στην οποία το σφάλμα γίνεται μηδέν.

Ελεγκτής PI
Ο ενσωματωμένος έλεγχος μειώνει την έξοδο του όταν συμβαίνει ένα αρνητικό σφάλμα. Περιορίζει την ταχύτητα απόκρισης και επηρεάζει τη σταθερότητα του συστήματος. Η ταχύτητα της απόκρισης αυξάνεται μειώνοντας το ακέραιο κέρδος, Ki.

Απόκριση ελεγκτή PI
Στο παραπάνω σχήμα, καθώς το κέρδος του ελεγκτή I μειώνεται, το σφάλμα σταθερής κατάστασης συνεχίζει επίσης να μειώνεται. Για τις περισσότερες περιπτώσεις, ο ελεγκτής PI χρησιμοποιείται ιδιαίτερα όταν δεν απαιτείται απόκριση υψηλής ταχύτητας.
Κατά τη χρήση του ελεγκτή PI, η έξοδος ελεγκτή I περιορίζεται σε κάποιο εύρος για να ξεπεραστεί το ολοκληρωμένη εκκαθάριση συνθήκες όπου η ολοκληρωμένη έξοδος συνεχίζει να αυξάνεται ακόμη και σε κατάσταση μηδενικού σφάλματος, λόγω μη γραμμικότητας στην εγκατάσταση.
D-ελεγκτής
Ο ελεγκτής I δεν έχει τη δυνατότητα να προβλέψει τη μελλοντική συμπεριφορά σφάλματος. Έτσι αντιδρά κανονικά μόλις αλλάξει το σημείο ρύθμισης. Ο ελεγκτής D ξεπερνά αυτό το πρόβλημα προβλέποντας τη μελλοντική συμπεριφορά του σφάλματος. Η έξοδος του εξαρτάται από το ρυθμό αλλαγής σφάλματος σε σχέση με το χρόνο, πολλαπλασιαζόμενο με τη σταθερά παραγώγου. Δίνει την έναρξη για την έξοδο αυξάνοντας έτσι την απόκριση του συστήματος.

Ελεγκτής PID
Στην παραπάνω απόκριση σχήματος του D, ο ελεγκτής είναι περισσότερο, σε σύγκριση με τον ελεγκτή PI, και επίσης μειώνεται ο χρόνος ρύθμισης της εξόδου. Βελτιώνει τη σταθερότητα του συστήματος αντισταθμίζοντας την καθυστέρηση φάσης που προκαλείται από τον ελεγκτή I. Η αύξηση του παραγώγου κέρδους αυξάνει την ταχύτητα απόκρισης.

Απόκριση ελεγκτή PID
Τελικά, παρατηρήσαμε ότι συνδυάζοντας αυτούς τους τρεις ελεγκτές, μπορούμε να λάβουμε την επιθυμητή απόκριση για το σύστημα. Διαφορετικοί κατασκευαστές σχεδιάζουν διαφορετικούς αλγόριθμους PID.
Τύποι ελεγκτή PID
Οι ελεγκτές PID ταξινομούνται σε τρεις τύπους όπως ON / OFF, αναλογικοί και τυπικοί ελεγκτές τύπου. Αυτοί οι ελεγκτές χρησιμοποιούνται με βάση το σύστημα ελέγχου, ο χρήστης μπορεί να χρησιμοποιήσει τον ελεγκτή για να ρυθμίσει τη μέθοδο.
Έλεγχος ON / OFF
Μια μέθοδος ελέγχου εκτός λειτουργίας είναι ο απλούστερος τύπος συσκευής που χρησιμοποιείται για έλεγχο θερμοκρασίας. Η έξοδος της συσκευής μπορεί να είναι ΕΝΕΡΓΟΠΟΙΗΣΗ / ΑΠΕΝΕΡΓΟΠΟΙΗΣΗ χωρίς καμία κεντρική κατάσταση. Αυτός ο ελεγκτής θα ενεργοποιήσει την έξοδο απλά όταν η θερμοκρασία διασχίσει το σταθερό σημείο. Ένας ελεγκτής ορίου είναι ένα συγκεκριμένο είδος ελεγκτή ON / OFF που χρησιμοποιεί ένα ρελέ μανδάλωσης. Αυτό το ρελέ επαναφέρεται χειροκίνητα και χρησιμοποιείται για την απενεργοποίηση μιας μεθόδου μόλις επιτευχθεί μια συγκεκριμένη θερμοκρασία.
Αναλογικός έλεγχος
Αυτό το είδος ελεγκτή έχει σχεδιαστεί για να αφαιρεί τον κύκλο που συνδέεται μέσω του ελέγχου ON / OFF. Αυτός ο ελεγκτής PID θα μειώσει την κανονική ισχύ που παρέχεται στον θερμαντήρα μόλις η θερμοκρασία φτάσει στο σταθερό σημείο.
Αυτός ο ελεγκτής έχει ένα χαρακτηριστικό για τον έλεγχο του θερμαντήρα έτσι ώστε να μην υπερβαίνει το σταθερό σημείο, ωστόσο θα φτάσει στο σταθερό σημείο για να διατηρήσει μια σταθερή θερμοκρασία.
Αυτή η αναλογική πράξη μπορεί να επιτευχθεί μέσω της ενεργοποίησης και απενεργοποίησης της εξόδου για μικρές χρονικές περιόδους. Αυτή η αναλογία χρόνου θα αλλάξει την αναλογία από χρόνο ON σε OFF χρόνο για τον έλεγχο της θερμοκρασίας.
Ελεγκτής PID τυπικού τύπου
Αυτό το είδος ελεγκτή PID θα συγχωνεύσει τον αναλογικό έλεγχο μέσω ολοκληρωμένου και παράγωγου ελέγχου για να βοηθήσει αυτόματα τη μονάδα να αντισταθμίσει τις τροποποιήσεις εντός του συστήματος. Αυτές οι τροποποιήσεις, ακέραιο και παράγωγο εκφράζονται σε μονάδες βάσει χρόνου.
Αυτοί οι ελεγκτές αναφέρονται επίσης μέσω των αμοιβαίων τους, RATE & RESET αντίστοιχα. Οι όροι του PID πρέπει να προσαρμόζονται ξεχωριστά διαφορετικά να συντονίζονται σε ένα συγκεκριμένο σύστημα με τη δοκιμή καθώς και το σφάλμα. Αυτοί οι ελεγκτές θα προσφέρουν τον πιο ακριβή και σταθερό έλεγχο των 3 τύπων ελεγκτή.
Ελεγκτές PID σε πραγματικό χρόνο
Προς το παρόν, υπάρχουν διάφορα είδη ελεγκτών PID που διατίθενται στην αγορά. Αυτοί οι ελεγκτές χρησιμοποιούνται για βιομηχανικές απαιτήσεις ελέγχου όπως πίεση, θερμοκρασία, επίπεδο και ροή. Μόλις αυτές οι παράμετροι ελέγχονται μέσω PID, οι επιλογές περιλαμβάνουν τη χρήση ενός ξεχωριστού ελεγκτή PID ή ενός PLC.
Αυτοί οι ξεχωριστοί ελεγκτές χρησιμοποιούνται όπου απαιτείται ένας διαφορετικός έλεγχος δύο βρόχων, καθώς και άλλως ελεγχόμενος στις συνθήκες όπου είναι περίπλοκο στα δεξιά της εισόδου μέσω μεγαλύτερων συστημάτων.
Αυτές οι συσκευές ελέγχου παρέχουν διαφορετικές επιλογές για έλεγχο σόλο και διπλού βρόχου. Οι αυτόνομοι ελεγκτές PID τύπου παρέχουν πολλές διαμορφώσεις σταθερού σημείου για την παραγωγή των αυτόνομων πολλών συναγερμών.
Αυτοί οι αυτόνομοι ελεγκτές περιλαμβάνουν κυρίως ελεγκτές PID από τη Honeywell, ελεγκτές θερμοκρασίας από τη Yokogawa, ελεγκτές αυτόματου συντονισμού από ελεγκτές OMEGA, Siemens και ABB.
Τα PLC χρησιμοποιούνται όπως οι ελεγκτές PID στις περισσότερες εφαρμογές βιομηχανικού ελέγχου. Η διάταξη των μπλοκ PID μπορεί να γίνει μέσα σε PAC ή PLC για να δώσει ανώτερες επιλογές για έναν ακριβή έλεγχο PLC. Αυτοί οι ελεγκτές είναι εξυπνότεροι και ισχυροί σε σύγκριση με ξεχωριστούς ελεγκτές. Κάθε PLC περιλαμβάνει το μπλοκ PID στον προγραμματισμό λογισμικού.
Μέθοδοι συντονισμού
Πριν από τη λειτουργία του ελεγκτή PID, πρέπει να συντονιστεί ώστε να ταιριάζει με τη δυναμική της διαδικασίας που πρέπει να ελέγχεται. Οι σχεδιαστές δίνουν τις προεπιλεγμένες τιμές για τους όρους P, I και D. και αυτές οι τιμές δεν μπορούσαν να δώσουν την επιθυμητή απόδοση και μερικές φορές οδηγούν σε αστάθεια και αργές επιδόσεις ελέγχου. Αναπτύσσονται διαφορετικοί τύποι μεθόδων συντονισμού για το συντονισμό των ελεγκτών PID και απαιτούν μεγάλη προσοχή από τον χειριστή για την επιλογή των καλύτερων τιμών των αναλογικών, ολοκληρωμένων και παράγωγων κερδών. Μερικά από αυτά δίνονται παρακάτω.
Οι ελεγκτές PID χρησιμοποιούνται στις περισσότερες βιομηχανικές εφαρμογές, αλλά πρέπει κανείς να γνωρίζει τις ρυθμίσεις αυτού του ελεγκτή για να τον προσαρμόσει σωστά για να δημιουργήσει την προτιμώμενη έξοδο. Εδώ, ο συντονισμός δεν είναι παρά η διαδικασία λήψης μιας ιδανικής απάντησης από τον ελεγκτή μέσω του καθορισμού καλύτερων αναλογικών κερδών, αναπόσπαστων και παραγώγων παραγόντων.
Η επιθυμητή έξοδος του ελεγκτή PID μπορεί να επιτευχθεί συντονίζοντας τον ελεγκτή. Υπάρχουν διάφορες τεχνικές διαθέσιμες για να λάβετε την απαιτούμενη έξοδο από τον ελεγκτή όπως δοκιμή & σφάλμα, Zeigler-Nichols & καμπύλη αντίδρασης διαδικασίας. Οι πιο συχνά χρησιμοποιούμενες μέθοδοι είναι δοκιμή & σφάλμα, Zeigler-Nichols κ.λπ.
Μέθοδος δοκιμής και σφάλματος: Είναι μια απλή μέθοδος συντονισμού PID. Ενώ το σύστημα ή ο ελεγκτής λειτουργεί, μπορούμε να συντονίσουμε τον ελεγκτή. Σε αυτήν τη μέθοδο, πρώτα, πρέπει να θέσουμε τις τιμές Ki και Kd στο μηδέν και να αυξήσουμε τον αναλογικό όρο (Kp) έως ότου το σύστημα φτάσει σε ταλαντωτική συμπεριφορά. Μόλις ταλαντωθεί, προσαρμόστε το Ki (ακέραιος όρος) έτσι ώστε οι ταλαντώσεις να σταματήσουν και, τέλος, να ρυθμίσουν το D για γρήγορη απόκριση.
Τεχνική καμπύλης αντίδρασης διαδικασίας: Είναι μια τεχνική συντονισμού ανοιχτού βρόχου. Παράγει μια απόκριση όταν μια βηματική είσοδος εφαρμόζεται στο σύστημα. Αρχικά, πρέπει να εφαρμόσουμε κάποια έξοδο ελέγχου στο σύστημα χειροκίνητα και πρέπει να καταγράψουμε την καμπύλη απόκρισης.
Μετά από αυτό, πρέπει να υπολογίσουμε την κλίση, τον νεκρό χρόνο, τον χρόνο ανόδου της καμπύλης και, τέλος, να αντικαταστήσουμε αυτές τις τιμές στις εξισώσεις P, I και D για να πάρουμε τις τιμές κέρδους των όρων PID.

Καμπύλη αντίδρασης διαδικασίας
Μέθοδος Zeigler-Nichols: Η Zeigler-Nichols πρότεινε μεθόδους κλειστού βρόχου για το συντονισμό του ελεγκτή PID. Αυτές είναι η μέθοδος συνεχούς ποδηλασίας και η μέθοδος απόσβεσης ταλάντωσης. Οι διαδικασίες και για τις δύο μεθόδους είναι οι ίδιες αλλά η συμπεριφορά ταλάντωσης είναι διαφορετική. Σε αυτό, πρώτα, πρέπει να ρυθμίσουμε τη σταθερά του ελεγκτή p, το Kp σε μια συγκεκριμένη τιμή ενώ οι τιμές Ki και Kd είναι μηδέν. Το αναλογικό κέρδος αυξάνεται έως ότου το σύστημα ταλαντωθεί σε σταθερό πλάτος.
Κέρδος στο οποίο το σύστημα παράγει σταθερές ταλαντώσεις ονομάζεται απόλυτο κέρδος (Ku) και η περίοδος ταλαντώσεων ονομάζεται τελική περίοδος (Pc). Μόλις επιτευχθεί, μπορούμε να εισαγάγουμε τις τιμές των P, I και D στον ελεγκτή PID από τον πίνακα Zeigler-Nichols εξαρτάται από τον ελεγκτή που χρησιμοποιείται όπως P, PI ή PID, όπως φαίνεται παρακάτω.

Πίνακας Zeigler-Nichols
Δομή ελεγκτή PID
Ο ελεγκτής PID αποτελείται από τρεις όρους, δηλαδή αναλογικό, ολοκληρωμένο και παράγωγο έλεγχο. Η συνδυασμένη λειτουργία αυτών των τριών ελεγκτών δίνει μια στρατηγική ελέγχου για τον έλεγχο της διαδικασίας. Ο ελεγκτής PID χειρίζεται τις μεταβλητές διεργασίας όπως πίεση, ταχύτητα, θερμοκρασία, ροή κ.λπ. Ορισμένες από τις εφαρμογές χρησιμοποιούν ελεγκτές PID σε δίκτυα καταρράκτη όπου χρησιμοποιούνται δύο ή περισσότερα PID για τον έλεγχο.

Δομή του ελεγκτή PID
Η παραπάνω εικόνα δείχνει τη δομή του ελεγκτή PID. Αποτελείται από ένα μπλοκ PID που δίνει την έξοδο του στο μπλοκ διαδικασίας. Η διεργασία / μονάδα αποτελείται από συσκευές τελικού ελέγχου όπως ενεργοποιητές, βαλβίδες ελέγχου και άλλες συσκευές ελέγχου για τον έλεγχο διαφόρων διαδικασιών βιομηχανίας / εγκατάστασης.
Ένα σήμα ανατροφοδότησης από τη μονάδα επεξεργασίας συγκρίνεται με ένα σημείο ρύθμισης ή σήμα αναφοράς u (t) και το αντίστοιχο σήμα σφάλματος e (t) τροφοδοτείται στον αλγόριθμο PID. Σύμφωνα με τους αναλογικούς, ολοκληρωμένους και παράγωγους υπολογισμούς ελέγχου στον αλγόριθμο, ο ελεγκτής παράγει μια συνδυασμένη απόκριση ή ελεγχόμενη έξοδο που εφαρμόζεται σε συσκευές ελέγχου εγκατάστασης.
Όλες οι εφαρμογές ελέγχου δεν χρειάζονται και τα τρία στοιχεία ελέγχου. Συνδυασμοί όπως οι έλεγχοι PI και PD χρησιμοποιούνται πολύ συχνά σε πρακτικές εφαρμογές.
Εφαρμογές
Οι εφαρμογές ελεγκτή PID περιλαμβάνουν τα ακόλουθα.
Η καλύτερη εφαρμογή ελεγκτή PID είναι ο έλεγχος θερμοκρασίας όπου ο ελεγκτής χρησιμοποιεί μια είσοδο ενός αισθητήρα θερμοκρασίας και η έξοδος του μπορεί να συνδεθεί με ένα στοιχείο ελέγχου όπως ένας ανεμιστήρας ή θερμαντήρας. Γενικά, αυτός ο ελεγκτής είναι απλά ένα στοιχείο σε ένα σύστημα ελέγχου θερμοκρασίας. Πρέπει να εξεταστεί ολόκληρο το σύστημα καθώς και να εξεταστεί κατά την επιλογή του σωστού ελεγκτή.
Έλεγχος θερμοκρασίας φούρνου
Σε γενικές γραμμές, οι κλίβανοι χρησιμοποιούνται για να περιλαμβάνουν θέρμανση, καθώς και τεράστια ποσότητα πρώτων υλών σε τεράστιες θερμοκρασίες. Είναι συνηθισμένο το υλικό που καταλαμβάνεται να περιλαμβάνει μια τεράστια μάζα. Κατά συνέπεια, χρειάζεται μεγάλη ποσότητα αδράνειας και η θερμοκρασία του υλικού δεν τροποποιείται γρήγορα ακόμα και όταν εφαρμόζεται τεράστια θερμότητα. Αυτό το χαρακτηριστικό έχει ως αποτέλεσμα ένα μετρίως σταθερό φωτοβολταϊκό σήμα και επιτρέπει στην παράγωγη περίοδο να διορθώσει αποτελεσματικά το σφάλμα χωρίς ακραίες αλλαγές είτε στο FCE είτε στο CO.
Ελεγκτής φόρτισης MPPT
Το χαρακτηριστικό V-I ενός φωτοβολταϊκού στοιχείου εξαρτάται κυρίως από το εύρος της θερμοκρασίας καθώς και από την ακτινοβολία. Με βάση τις καιρικές συνθήκες, η τάση ρεύματος και λειτουργίας θα αλλάζει συνεχώς. Έτσι, είναι εξαιρετικά σημαντικό να παρακολουθείτε το υψηλότερο PowerPoint ενός αποτελεσματικού φωτοβολταϊκού συστήματος. Ο ελεγκτής PID χρησιμοποιείται για την εύρεση MPPT δίνοντας σταθερά σημεία τάσης και ρεύματος στον ελεγκτή PID. Μόλις αλλάξει η καιρική κατάσταση, τότε ο ιχνηλάτης διατηρεί το ρεύμα και την τάση σταθερή.
Ο Μετατροπέας Ηλεκτρονικών Ισχύος
Γνωρίζουμε ότι ο μετατροπέας είναι μια εφαρμογή ηλεκτρονικών ισχύος, επομένως ένας ελεγκτής PID χρησιμοποιείται κυρίως σε μετατροπείς. Κάθε φορά που ένας μετατροπέας συνδέεται μέσω ενός συστήματος που βασίζεται στην αλλαγή εντός του φορτίου, τότε η έξοδος του μετατροπέα θα αλλάζει. Για παράδειγμα, ένας μετατροπέας συνδέεται με φορτίο, το τεράστιο ρεύμα παρέχεται μόλις αυξηθούν τα φορτία. Έτσι, η παράμετρος της τάσης καθώς και του ρεύματος δεν είναι σταθερή, αλλά θα αλλάξει με βάση την απαίτηση.
Σε αυτήν την κατάσταση, αυτός ο ελεγκτής θα παράγει σήματα PWM για την ενεργοποίηση των IGBT του μετατροπέα. Με βάση την αλλαγή εντός του φορτίου, το σήμα απόκρισης παρέχεται στον ελεγκτή PID έτσι ώστε να παράγει n σφάλμα. Αυτά τα σήματα δημιουργούνται με βάση το σήμα σφάλματος. Σε αυτήν την κατάσταση, μπορούμε να αποκτήσουμε μεταβλητή είσοδο και έξοδο μέσω ενός παρόμοιου μετατροπέα.
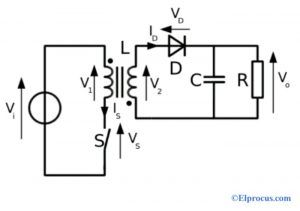
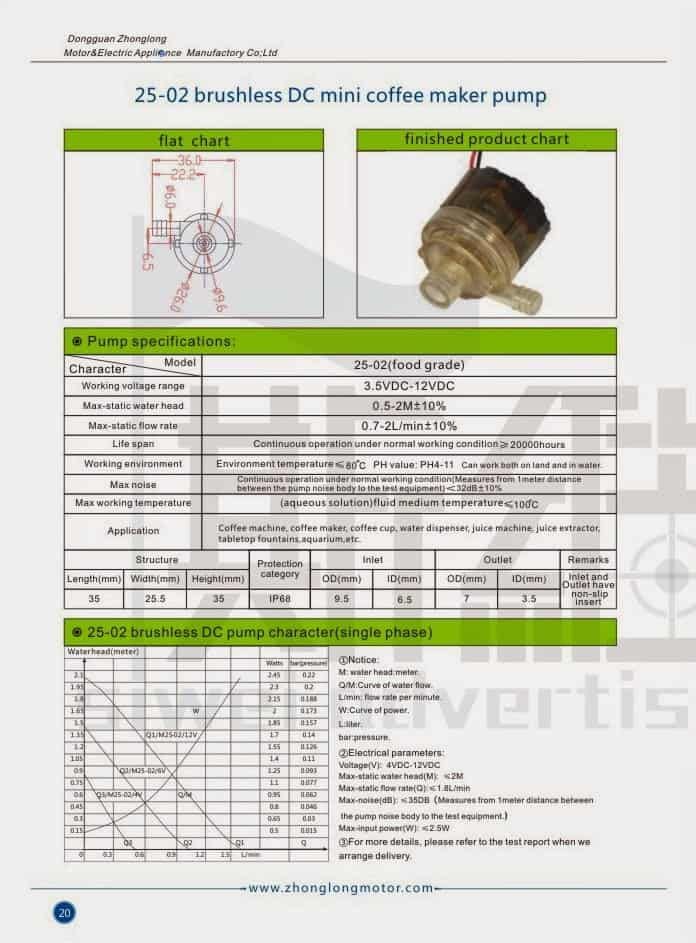
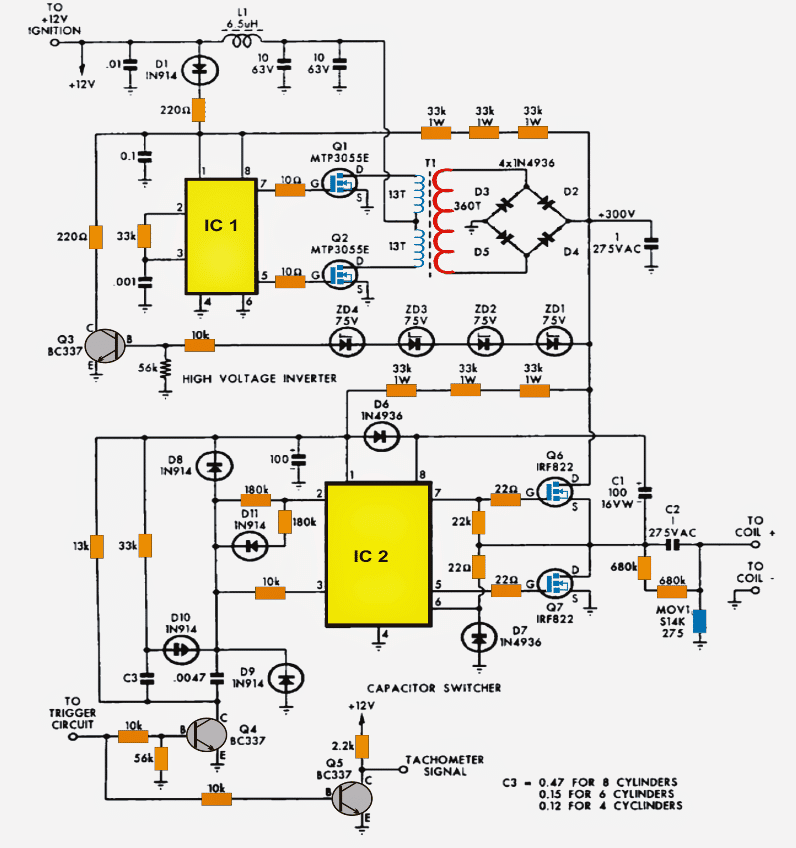
Εφαρμογή του PID Controller: Έλεγχος κλειστού βρόχου για κινητήρα DC χωρίς ψήκτρες
Διασύνδεση ελεγκτή PID
Ο σχεδιασμός και η διασύνδεση του ελεγκτή PID μπορούν να γίνουν χρησιμοποιώντας τον μικροελεγκτή Arduino. Στο εργαστήριο, ο ελεγκτής PID με βάση το Arduino έχει σχεδιαστεί χρησιμοποιώντας την πλακέτα Arduino UNO, ηλεκτρονικά εξαρτήματα, θερμοηλεκτρικό ψυγείο, ενώ οι γλώσσες προγραμματισμού λογισμικού που χρησιμοποιούνται σε αυτό το σύστημα είναι C ή C ++. Αυτό το σύστημα χρησιμοποιείται για τον έλεγχο της θερμοκρασίας στο εργαστήριο.
Οι παράμετροι του PID για έναν συγκεκριμένο ελεγκτή βρίσκονται φυσικά. Η λειτουργία διαφόρων παραμέτρων PID μπορεί να εφαρμοστεί μέσω της επακόλουθης αντίθεσης μεταξύ διαφορετικών μορφών ελεγκτών.
Αυτό το σύστημα διασύνδεσης μπορεί να υπολογίσει αποτελεσματικά τη θερμοκρασία μέσω σφάλματος ± 0,6 ℃ ενώ μια σταθερή θερμοκρασία ρυθμίζεται μέσω μιας μικρής διαφοράς από την προτιμώμενη τιμή. Οι έννοιες που χρησιμοποιούνται σε αυτό το σύστημα θα παρέχουν φθηνές καθώς και ακριβείς τεχνικές για τη διαχείριση φυσικών παραμέτρων σε μια προτιμώμενη περιοχή εντός του εργαστηρίου.
Έτσι, αυτό το άρθρο ασχολείται με μια επισκόπηση του ελεγκτή PID που περιλαμβάνει ιστορικό, διάγραμμα μπλοκ, δομή, τύπους, λειτουργίες, μεθόδους συντονισμού, διασύνδεση, πλεονεκτήματα και εφαρμογές. Ελπίζουμε να μπορέσαμε να παρέχουμε βασικές αλλά ακριβείς γνώσεις σχετικά με τους ελεγκτές PID. Εδώ είναι μια απλή ερώτηση για όλους σας. Μεταξύ των διαφορετικών μεθόδων συντονισμού, ποια μέθοδος χρησιμοποιείται κατά προτίμηση για την επίτευξη της βέλτιστης λειτουργίας του ελεγκτή PID και γιατί;
Σας παρακαλούμε να δώσετε τις απαντήσεις σας στην παρακάτω ενότητα σχολίων.
Φωτογραφικές μονάδες
Διάγραμμα μπλοκ ελεγκτή PID από wikimedia
Δομή ελεγκτή PID, ελεγκτής P, P - απόκριση ελεγκτή & ελεγκτής PID από blog.opticontrols
P - απόκριση ελεγκτή από controls.engin.umich
Απόκριση ελεγκτή PI από μ. τρώω
Απόκριση ελεγκτή PID από wikimedia
Πίνακας Zeigler-Nichols από controls.engin









{kind=link}
{kind=link}
{kind=link}
{kind=link}