Γενικά, ένας καταχωρητής μπορεί να οριστεί ως μια συσκευή που χρησιμοποιείται για την αποθήκευση των δυαδικών δεδομένων, αλλά εάν θέλετε να αποθηκεύσετε πολλά bit δεδομένων, τότε χρησιμοποιείται ένα σύνολο από Flip flops που συνδέονται σε σειρά. Τα δεδομένα που είναι αποθηκευμένα στους καταχωρητές μπορούν να μετατοπιστούν χρησιμοποιώντας καταχωρητές μετατόπισης είτε στη δεξιά είτε στην αριστερή πλευρά παρέχοντας παλμούς CLK. Εγγραφή Shift είναι μια ομάδα από σαγιονάρες χρησιμοποιείται για την αποθήκευση πολλών bits δεδομένων. Ομοίως, ένας καταχωρητής μετατόπισης με n-bits μπορεί να σχηματιστεί συνδέοντας απλά n flip-flops όπου κάθε flip-flop αποθηκεύει απλώς ένα μόνο bit δεδομένων. Μόλις ο καταχωρητής μετατοπίσει τα bit στη δεξιά πλευρά, είναι ο δεξιός καταχωρητής μετατόπισης, ενώ εάν μετατοπιστεί στην αριστερή πλευρά, τότε είναι γνωστός ως καταχωρητής αριστερού μετατόπισης. Αυτό το άρθρο εξετάζει μια επισκόπηση ενός από τους τύπους καταχωρητή μετατόπισης, δηλαδή σειριακό παράλληλο καταχωρητή μετατόπισης ή Καταχωρητής μετατόπισης SIPO .
Τι είναι το SIPO Shift Register;
Ο καταχωρητής μετατόπισης που επιτρέπει σειριακή είσοδο παράλληλης εξόδου είναι γνωστός ως καταχωρητής μετατόπισης SIPO. Στον καταχωρητή SIPO, ο όρος SIPO σημαίνει παράλληλη έξοδος σειριακής εισόδου. Σε αυτόν τον τύπο καταχωρητή μετατόπισης, τα δεδομένα εισόδου δίνονται σειριακά κομμάτι προς bit. Για κάθε παλμό ρολογιού, τα δεδομένα εισόδου σε όλα τα FF μπορούν να μετατοπιστούν κατά μία μόνο θέση. Το o/p σε κάθε flip-flop μπορεί να ληφθεί παράλληλα.
Διάγραμμα κυκλώματος
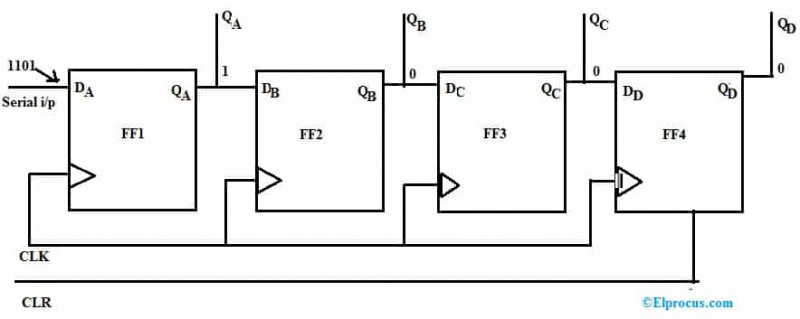
ο Διάγραμμα κυκλώματος καταχωρητή μετατόπισης SISO φαίνεται παρακάτω. Αυτό το κύκλωμα μπορεί να κατασκευαστεί με 4 D flip-flops που συνδέονται όπως φαίνεται στο διάγραμμα όπου το σήμα CLR δίνεται επιπλέον στο σήμα CLK σε όλα τα FF ή RESET τους. Στο παραπάνω κύκλωμα, η πρώτη έξοδος FF δίνεται στη δεύτερη είσοδο FFs. Και οι τέσσερις αυτές σαγιονάρες D συνδέονται μεταξύ τους σειριακά επειδή το ίδιο σήμα CLK δίνεται σε κάθε flip-flop.
Λειτουργία του Μητρώου Βάρδιας SIPO
Η λειτουργία του καταχωρητή βάρδιας SIPO είναι: ότι παίρνει την είσοδο σειριακών δεδομένων από το πρώτο flip flop της αριστερής πλευράς και δημιουργεί μια παράλληλη έξοδο δεδομένων. Το κύκλωμα καταχωρητή μετατόπισης SIPO 4-bit φαίνεται παρακάτω. Η λειτουργία αυτού του καταχωρητή μετατόπισης είναι, πρώτα όλα τα flip flop από το κύκλωμα από το FF1 στο FF4 πρέπει να RESET, έτσι ώστε όλες οι έξοδοι των FF, όπως το QA έως το QD, να είναι στο λογικό μηδέν επίπεδο, ώστε να μην υπάρχει παράλληλη έξοδος δεδομένων.
Η κατασκευή του καταχωρητή μετατόπισης SIPO φαίνεται παραπάνω. Στο διάγραμμα, η πρώτη έξοδος flip flop «QA» συνδέεται με τη δεύτερη είσοδο flip flop «DB». Η δεύτερη έξοδος σαγιονάρας «QB» συνδέεται με την τρίτη είσοδο σαγιονάρας DC και η τρίτη έξοδος σαγιονάρας «QC» συνδέεται με την τέταρτη είσοδο σαγιονάρας «DD». Εδώ, τα QA, QB, QC και QD είναι έξοδοι δεδομένων.
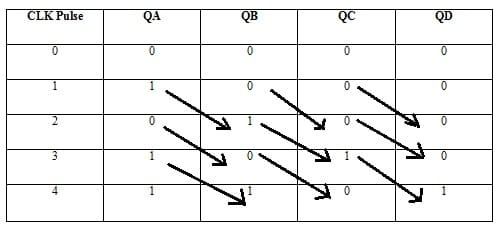
Αρχικά, όλη η έξοδος θα γίνει μηδέν, οπότε χωρίς παλμό CLK. όλα τα δεδομένα θα γίνουν μηδέν. Ας πάρουμε ένα παράδειγμα εισαγωγής δεδομένων 4 bit όπως το 1101. Εάν εφαρμόσουμε τον πρώτο παλμό ρολογιού '1' στο πρώτο flip flop, τα δεδομένα που θα εισαχθούν στο FF και το QA γίνονται '1' και παραμένουν όλες οι έξοδοι όπως το QB , το QC και το QD θα γίνουν μηδενικά. Έτσι η πρώτη έξοδος δεδομένων είναι '1000'
Εάν εφαρμόσουμε τον δεύτερο παλμό ρολογιού ως «0» στο πρώτο flip flop, τότε το QA γίνεται «0», το QB γίνεται «0», το QC γίνεται «0» και το QD γίνεται «0». Έτσι, η δεύτερη έξοδος δεδομένων θα γίνει «0100» λόγω της διαδικασίας μετατόπισης προς τα δεξιά.
Εάν εφαρμόσουμε τον τρίτο παλμό ρολογιού ως «1» στο πρώτο flip flop, τότε το QA γίνεται «1», το QB γίνεται «0», το QC γίνεται «1» και το QD γίνεται «0». Έτσι, η τρίτη έξοδος δεδομένων θα γίνει '1011' λόγω της διαδικασίας μετατόπισης προς τα δεξιά.
Εάν εφαρμόσουμε τον τέταρτο παλμό ρολογιού ως «1» στο πρώτο flip flop, τότε το QA γίνεται «1», το QB γίνεται «1», το QC γίνεται «0» και το QD γίνεται «1». Έτσι, η τρίτη έξοδος δεδομένων θα γίνει '1101' λόγω της διαδικασίας μετατόπισης προς τα δεξιά.
Πίνακας αληθειών του μητρώου SIPO Shift
Ο πίνακας αλήθειας του καταχωρητή μετατόπισης SIPO φαίνεται παρακάτω.
Διάγραμμα χρονισμού
ο διάγραμμα χρονισμού του καταχωρητή μετατόπισης SIPO φαίνεται παρακάτω.
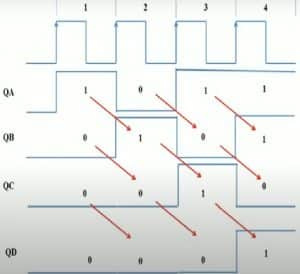
Εδώ χρησιμοποιούμε ένα σήμα θετικής ακμής CLK i/p. Σε έναν πρώτο παλμό ρολογιού τα δεδομένα εισόδου γίνονται QA = «1» και όλες οι άλλες τιμές όπως QB, QC και QD γίνονται «0». Έτσι η έξοδος θα γίνει «1000». Στον δεύτερο παλμό ρολογιού, η έξοδος θα γίνει «0101». Στον τρίτο παλμό ρολογιού, η έξοδος θα γίνει «1010» και στον τέταρτο παλμό ρολογιού, η έξοδος θα γίνει «1101».
SIPO Shift Register Verilog Code
Ο κωδικός Verilog για τον καταχωρητή μετατόπισης SIPO φαίνεται παρακάτω.
ενότητα sipomod(clk,clear,si,po);
input clk, si,clear;
έξοδος [3:0] po;
reg [3:0] tmp;
reg [3:0] po;
πάντα @(posge clk)
να αρχίσει
αν (καθαρό)
tmp <= 4'b0000;
αλλού
tmp <= tmp << 1;
tmp[0] <= ναι;
po = tmp;
τέλος
endmodule
74HC595 IC SIPO Shift Register Circuit and Its Working
Ένα IC 74HC595 είναι ένας σειριακός καταχωρητής μετατόπισης 8-bit σε παράλληλη έξοδο, επομένως χρησιμοποιεί εισόδους σειριακά και παρέχει παράλληλες εξόδους. Αυτό το IC περιλαμβάνει 16 ακίδες και διατίθεται σε διαφορετικές συσκευασίες όπως SOIC, DIP, TSSOP & SSOP.
Η Διαμόρφωση ακίδας του 74HC595 φαίνεται παρακάτω, όπου κάθε ακροδέκτης συζητείται παρακάτω.
Pins 1 έως 7 & 15 (QB σε QH & QA): Αυτές είναι οι ακίδες o/p που χρησιμοποιούνται για τη σύνδεση συσκευών εξόδου, όπως οθόνες 7 τμημάτων και LED.
Pin8 (GND): Αυτός ο ακροδέκτης GND συνδέεται απλώς με τον ακροδέκτη GND του τροφοδοτικού του μικροελεγκτή.
Pin9 (QH): Αυτός ο ακροδέκτης χρησιμοποιείται για να συνδεθεί με τον ακροδέκτη SER διαφορετικού IC και να δώσει το ίδιο σήμα CLK και στα δύο IC, έτσι ώστε να λειτουργούν σαν ένα μόνο IC που περιλαμβάνει 16 εξόδους.
Pin16 (Vcc): Αυτός ο ακροδέκτης χρησιμοποιείται για σύνδεση με τον μικροελεγκτή διαφορετικά Τροφοδοτικό επειδή είναι IC λογικού επιπέδου 5V.
Pin14 (BE): Είναι το Serial i/p Pin όπου τα δεδομένα εισάγονται σειριακά σε όλο αυτό το pin.
Pin11 (SRCLK): Είναι το Shift Register CLK Pin που λειτουργεί όπως το CLK για τον Shift Register επειδή το σήμα CLK δίνεται σε αυτόν τον pin.
Pin12 (RCLK): Είναι η ακίδα Register CLK που χρησιμοποιείται για την παρατήρηση o/ps στις συσκευές που είναι συνδεδεμένες σε αυτά τα IC.
Pin10 (SRCLR): Είναι το Shift Register CLR Pin. Αυτή η καρφίτσα χρησιμοποιείται κυρίως όταν πρέπει να καθαρίσουμε τον χώρο αποθήκευσης του μητρώου.
Pin13 (OE): Είναι το o/p Enable Pin. Μόλις αυτή η ακίδα ρυθμιστεί σε HIGH, τότε ο καταχωρητής μετατόπισης έχει ρυθμιστεί σε μια συνθήκη υψηλής σύνθετης αντίστασης και τα o/ps δεν μεταδίδονται. Εάν θέσουμε αυτήν την καρφίτσα σε χαμηλή τιμή, μπορούμε να πάρουμε το o/ps.
74HC595 IC Λειτουργεί
Το διάγραμμα κυκλώματος του 74HC595 IC για τον έλεγχο των LED φαίνεται παρακάτω. Οι 3 ακίδες του καταχωρητή αλλαγής ταχυτήτων χρειάζονται για να συνδεθούν στο Arduino όπως οι ακίδες 11, 12 και 14. Και οι οκτώ λυχνίες LED θα συνδεθούν απλά σε αυτό το IC καταχωρητή αλλαγής ταχυτήτων.
Τα απαιτούμενα εξαρτήματα για τη σχεδίαση αυτού του κυκλώματος περιλαμβάνουν κυρίως ένα IC 74HC595 Shift Register, Arduino UNO, Τροφοδοτικό 5V, Breadboard, 8 LED, Αντιστάσεις 1KΩ – 8 και καλώδια σύνδεσης.
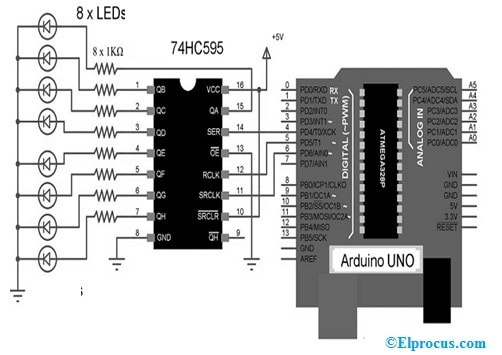
Πρώτα, το Serial i/p Pin του Shift Register πρέπει να συνδεθεί με το Pin-4 του Arduino Uno. Μετά από αυτό, συνδέστε και τις δύο ακίδες CLK και ασφάλισης όπως οι ακίδες 11 και 12 του IC στις ακίδες 5 και 6 του Arduino Uno αντίστοιχα. Τα LED συνδέονται με τη χρήση αντιστάσεων περιορισμού ρεύματος 1KΩ στις ακίδες 8-o/p του IC. Χρησιμοποιείται ξεχωριστό τροφοδοτικό 5V για 74HC595 IC με κοινό GND στο Arduino πριν από την παροχή 5V από το Arduino.
Κώδικας
Ο απλός κωδικός για την ενεργοποίηση 8 LED σε σειρά φαίνεται παρακάτω.
int latchPin = 5;
int clkPin = 6;
int dataPin = 4;
byte LED = 0;
void setup()
{
Serial.begin(9600);
pinMode(latchPin, OUTPUT);
pinMode(dataPin, OUTPUT);
pinMode(clkPin, OUTPUT);
}
void loop()
{
int i=0;
LED = 0;
shiftLED();
καθυστέρηση (500);
για (i = 0; i < 8; i++)
{
bitSet(LED, i);
Serial.println(LED);
shiftLED();
καθυστέρηση (500);
}
}
void shiftLED()
{
digitalWrite(latchPin, LOW);
shiftOut(dataPin, clkPin, MSBFIRST, LED);
digitalWrite(latchPin, HIGH);
}
Η λειτουργία αυτού του κυκλώματος καταχωρητή μετατόπισης είναι, στην αρχή και τα 8 LED θα απενεργοποιηθούν επειδή η μεταβλητή LED του byte έχει ρυθμιστεί στο μηδέν. Τώρα, κάθε bit έχει ρυθμιστεί στο 1 με τη λειτουργία 'bitSet' και μετατοπίζεται προς τα έξω με τη λειτουργία 'shiftOut'. Ομοίως, κάθε LED θα ανάβει στην ίδια σειρά. Εάν θέλετε να απενεργοποιήσετε το LED, τότε μπορείτε να χρησιμοποιήσετε τη λειτουργία 'bitClear'.
Το 74HC595 Shift Register IC χρησιμοποιείται σε διάφορες εφαρμογές όπως διακομιστές, έλεγχος LED, βιομηχανικός έλεγχος, ηλεκτρονικές συσκευές, διακόπτες δικτύου κ.λπ.
Εφαρμογές
ο εφαρμογές καταχωρητή μετατόπισης παράλληλης εξόδου σειριακής εισόδου φαίνεται παρακάτω.
- Γενικά, ο καταχωρητής μετατόπισης χρησιμοποιείται για την αποθήκευση προσωρινών δεδομένων, που χρησιμοποιούνται ως ring & Johnson Δαχτυλίδι μετρητής .
- Αυτά χρησιμοποιούνται για μεταφορά δεδομένων και χειρισμό.
- Αυτά τα flip flops χρησιμοποιούνται κυρίως σε γραμμές επικοινωνίας όπου είναι απαραίτητη μια γραμμή δεδομένων που αποπολυπλέκεται σε πολλές παράλληλες γραμμές επειδή αυτός ο καταχωρητής μετατόπισης χρησιμοποιείται για την αλλαγή των δεδομένων από σειριακή σε παράλληλη.
- Αυτά χρησιμοποιούνται για κρυπτογράφηση και αποκρυπτογράφηση δεδομένων.
- Αυτός ο καταχωρητής μετατόπισης χρησιμοποιείται στο CDMA για τη δημιουργία κωδικού PN ή Αριθμού Ακολουθίας Ψευδοθορύβου.
- Μπορούμε να τα χρησιμοποιήσουμε για να παρακολουθούμε τα δεδομένα μας!
- Ο καταχωρητής μετατόπισης SIPO χρησιμοποιείται σε διάφορες ψηφιακές εφαρμογές για τη μετατροπή δεδομένων.
- Μερικές φορές, αυτός ο τύπος καταχωρητή μετατόπισης συνδέεται απλώς με τον μικροεπεξεργαστή όταν απαιτούνται περισσότερες ακίδες GPIO.
- Η πρακτική εφαρμογή αυτού του καταχωρητή μετατόπισης SIPO είναι να δίνει τα δεδομένα εξόδου του μικροεπεξεργαστή σε μια ένδειξη απομακρυσμένου πίνακα.
Επομένως, αυτή είναι μια επισκόπηση του SIPO μητρώο βάρδιας – κύκλωμα, εργασία, πίνακας αλήθειας και διάγραμμα χρονισμού με εφαρμογές. Τα πιο συχνά χρησιμοποιούμενα στοιχεία καταχωρητή μετατόπισης SIPO είναι 74HC595, 74LS164, 74HC164/74164, SN74ALS164A, SN74AHC594, SN74AHC595 και CD4094. Αυτοί οι καταχωρητές είναι πολύ γρήγοροι στη χρήση, τα δεδομένα μπορούν να μετατραπούν πολύ εύκολα από σειριακά σε παράλληλα και ο σχεδιασμός τους είναι απλός. Εδώ είναι μια ερώτηση για εσάς, τι είναι ο καταχωρητής μετατόπισης PISO.